Ingegneria Meccanica – Roma Tre
AA/2011-2012
APPUNTI PER IL CORSO
(Ripresi integralmente e da me assemblati dai testi di bibliografia)
Roberto Renzetti
Bibliografia: R. Renzetti –Vari appunti miei raccolti negli anni -www.fisicamente.blog
CONSERVAZIONE RELATIVISTICA DELLA QUANTITÀ DI MOTO.
Supponiamo di trovarci in quiete su di un dato sistema di riferimento S’ e di voler studiare la conservazione della quantità di moto nel caso di un urto centrale completamente anelastico (220) tra due masse uguali m che viaggiano in verso opposto con la stessa velocità (in modulo) u, come
mostrato nella figura 53 [si noti che il sistema S’ può essere chiamato il sistema del baricentro].
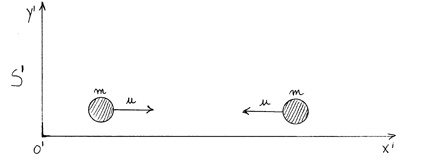
Figura 53
La quantità di moto totale delle due masse prima dell’urto sarà:
mu + (- mu) = 0
La situazione dopo l’urto vede le due masse immobili e legate tra di loro (figura 54).
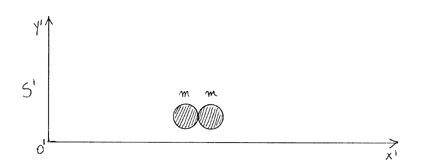
Figura 54
La quantità di moto dopo l’urto sarà allora:
m.0 + m.0 = 0
in completo accordo con la fondamentale legge di conservazione della quantità di moto che ci fornisce la dinamica classica.
Supponiamo ora di osservare lo stesso fenomeno da un riferimento S (nel quale noi siamo in quiete) rispetto al quale il sistema S’ è in moto con velocità u, la stessa in modulo di quella delle due masse che vanno ad urtarsi (il moto relativo avvenga con le medesime modalità che abbiamo sempre considerato: l’asse x’ di S’ scivoli sull’asse x di S mentre gli assi y’ e z’ si mantengano rispettivamente paralleli agli assi y e z, cose mostrato in figura 55). Supponiamo inoltre di avere a che fare con velocità piccole rispetto a quella della luce (u << c).
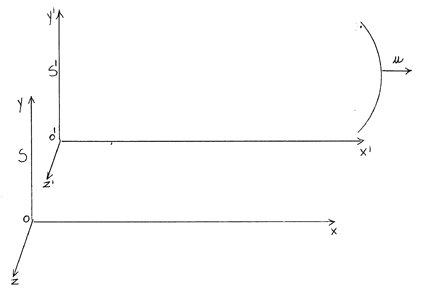
Figura 55
Nelle nostre ipotesi, poiché la velocità v di S’ è la stessa di quella posseduta dalle due masse, una di queste ultime risulterà immobile rispetto ad S. La situazione prima dell’urto è rappresentata dalla figura 56 dove, in accordo con le trasformazioni di Galileo per la velocità, si vede che la quantità di
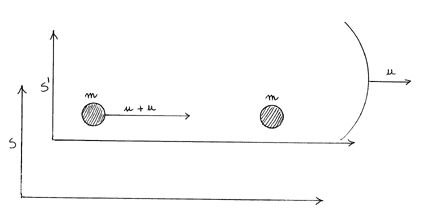
Figura 56
moto totale, rispetto all’osservatore che si trova su S, è data da:
m (u + u) + m (u – u) = 2mu.
La situazione dopo l’urto è rappresentata dalla figura 57. Per la quantità di moto totale, sempre rispetto
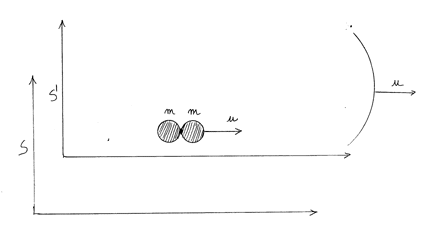
Figura 57
all’osservatore che si trova su S, si ha:
m (u + 0) + m (u – 0) = 2mu.
In definitiva, quando u << c, la quantità di moto si conserva in tutti i sistemi inerziali; e ciò si può anche dire affermando che la conservazione della quantità di moto è un invariante per una trasformazione di Galileo (come del resto già sapevamo).
E nel caso non sia più verificata la condizione u << c cosa succede? Bisognerà tener conto della composizione relativistica delle velocità e l’osservazione da S di un fenomeno d’urto su S’, secondo le modalità viste prima, diventa ben altra cosa.
La situazione prima dell’urto è descritta dalla figura 58.
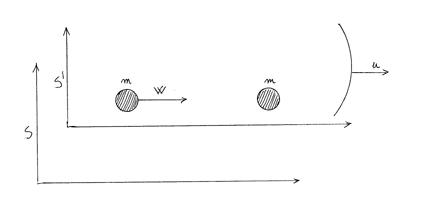
Figura 58
La quantità di moto totale, ricordando la composizione delle velocità, sarà data da:
m.w + m.0 = m (u + u).(1 + u2/c2) + m.0 = 2mu.( 1 + u2/c2)
Dopo l’urto la situazione è descritta dalla figura 59 e la quantità di moto totale sarà data
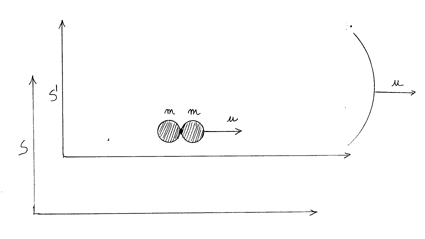
Figura 59
da:
2mu.
Con un facile confronto con quanto ricavato per la conservazione della quantità di moto nel caso in cui l’osservatore si trovava su S’ si ricava subito che:
– per l’osservatore in quiete rispetto all’urto, si conserva la quantità di moto;
– per l’osservatore in moto rispetto al fenomeno, la quantità di moto non si conserva più, infatti:
2mu.( 1 + u2/c2) ≠ 2mu.
In definitiva la quantità di moto che risulta conservata in un dato riferimento, non lo è più per un altro riferimento in moto con velocità u rispetto al primo.
Da qui possiamo scegliere almeno due strade:
1) rinunciare alla conservazione della quantità di moto;
2) riformulare l’equazione p = m.v che definisce la quantità di moto (si noti che a p spesso si dà anche il nome di impulso).
La strada che è stata scelta è la seconda: la conservazione della quantità di moto, come del resto i vari principi di conservazione, come ancora le varie simmetrie sembrano a tutt’oggi indiscutibili (valore euristico delle teorie scientifiche).
Si tratta allora di andare a cercare un’altra definizione per la quantità di moto ammettendo la sua conservazione relativistica, tale che:
1) renda invariante la sua conservazione per una trasformazione di Lorentz;
2) fornisca la relazione classica p = m.v, valida sperimentalmente per v << c.
Procediamo nel modo seguente (vedi bibl. 212).
Supponiamo che due osservatori, A e B, siano in moto, l’uno relativamente all’altro; le velocità di A e di B siano ugnali in modulo (ux), opposte in verso e dirette parallelamente all’asse x di un dato riferimento (figara 60). Ad un dato istante ambedue gli osservatori lancino, in direzione parallela all’asse
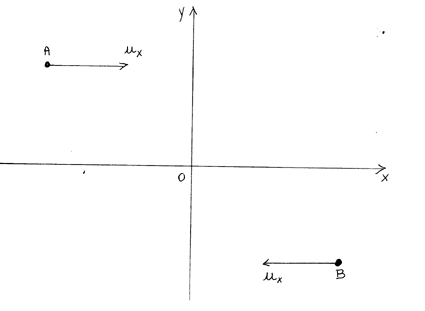
Figura 60
y, ciascuno una massa m (le due masse sono identiche quando sono confrontate in un riferimento in cui ambedue sono a riposo) con velocità uy , ugnale in modulo ed opposta in verso (figura 61). Le due masse m subiranno un urto anelastico nell’origine O del sistema di riferimento da noi preso in considerazione.
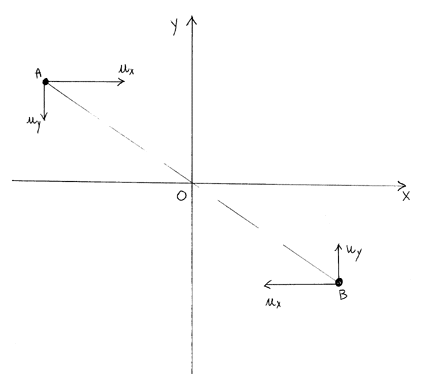
Figura 61
Il problema che dobbiamo risolvere può essere posto in questa forma: sia S un sistema di riferimento la cui origine è in B e che si sposta solidalmente con B; sia S’ un sistema di riferimento la cui origine è in A e si sposta solidalmente con A; qual è la situazione vista da B ? Ora B si trova su un riferimento S, supposto in quiete, che vede il sistema S’ muoversi con una velocità v, composizione relativistica delle due velocità u (la figura 62 descrive la situazione).
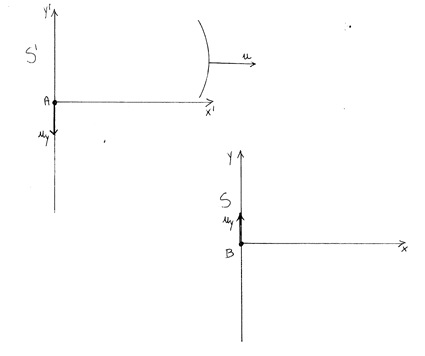
Figura 62
Cominciamo intanto a calcolarci la velocità v risultante della composizione relativistica del modulo della velocità n di A e del modulo della velocità ux di B. Ricordando le (14) ed in particolare l’espressione per la componente della velocità lungo l’asse x, si ha:

Calcoliamoci ora la velocità u che B osserva per la massa proveniente da A. Poiché si ha:
uy = Δy/Δt
ricordando la (7) e cioè:
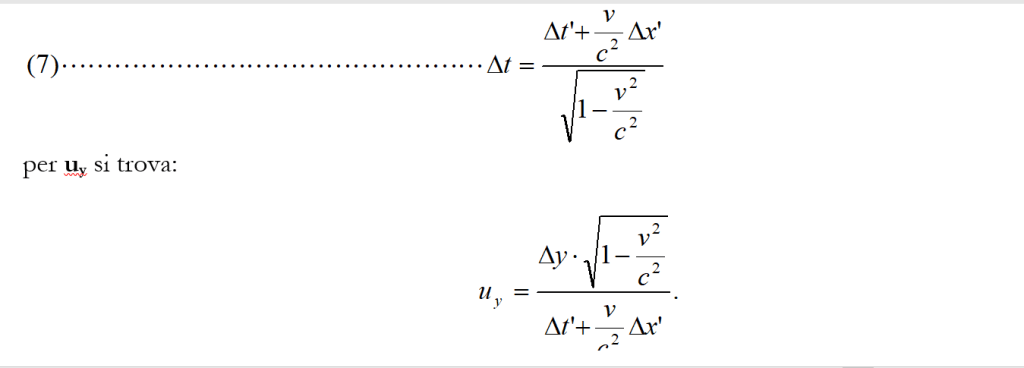
Poniamo ora attenzione su quanto ci dicono le trasformazioni di Lorentz (8):
– poiché y = y’ risulterà anche Δy = Δy’ e ciò vuol dire che gli spostamenti lungo l’asse y (o y’) sono invarianti per una trasformazione di Lorentz}
– poiché la massa proveniente da A ha in S’ solo una componente di velocità lungo y’, per essa risulterà Δx’ = 0. Tenendo conto di ciò l’ultima relazione scritta diventa:
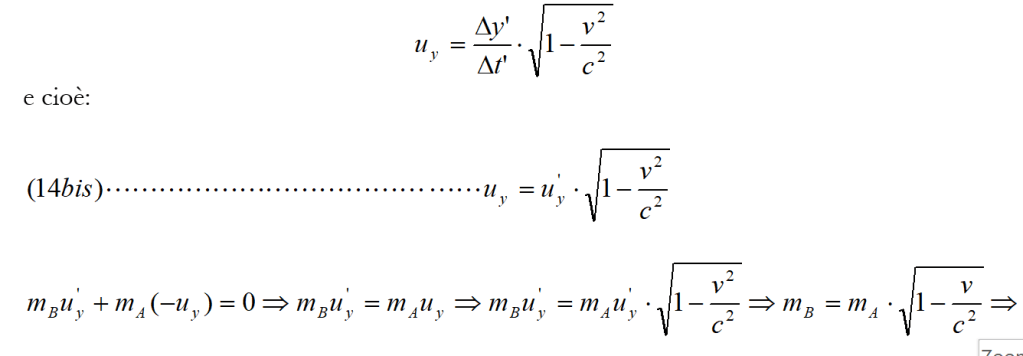
Poiché mB è la massa considerata nel sistema di riferimento S in quiete, essa è chiamata massa a riposo ed indicata con mo; la massa mA è indicata genericamente con m (v) ed è chiamata massa relativistica. Si ottiene così l’importante risultato che ci fornisce la massa come funzione della velocità:

(si noti che la v che compare nella formula è la velocità di una data massa rispetto ad un dato riferimento e non la velocità di un riferimento rispetto all’altro). Questa relazione si riduce a quella classica, m = mo , quando v << c. Essa ci dice che la massa newtoniana mo è solo un’approssimazione, per v tendente a zero, della più generale definizione di massa come funzione crescente della velocità:
m = m (v)
Andiamo ora a vedere se questa espressione per la massa (16), introdotta nell’espressione p = mv che ci forniva la quantità di moto classica, ne garantisce l’invarianza per una trasformazione di Lorentz.
L’espressione della quantità di moto è ora (si vedano le figure 63 e 64):
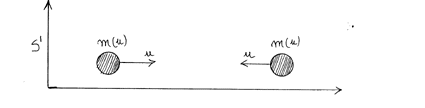
Figura 63
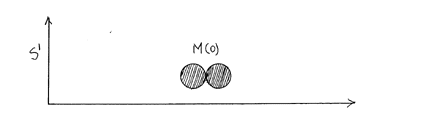
Figura 64
– prima dell’urto:
m(u).u – m(u).u = 0
– dopo l’urto:
M(0).0 = 0
Andiamo ora ad osservare lo stesso fenomeno da un. sistema S rispetto al quale S’ risulta in moto con velocità u (si rivedano le figure 58 e 59 relative, rispettivamente, a prima e dopo l’urto). Anche qui occorrerà ridisegnare ciò che è osservato da S per lo stesso motivo visto prima (figaro 65 e 66).
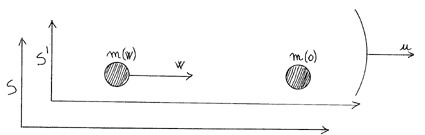
Figura 65
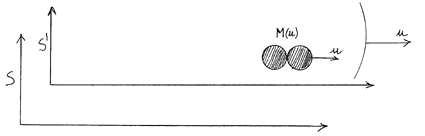
Figura 66
Si ha:
p = m(v).v
e cioè:

Se si ricorda poi quanto visto nella sezione relativa alla composizione delle velocità, possiamo specificare meglio la relazione precedente secondo le componenti px , py e pz della quantità di moto relative ai singoli assi coordinati. Con ovvio significato dei simboli si ha
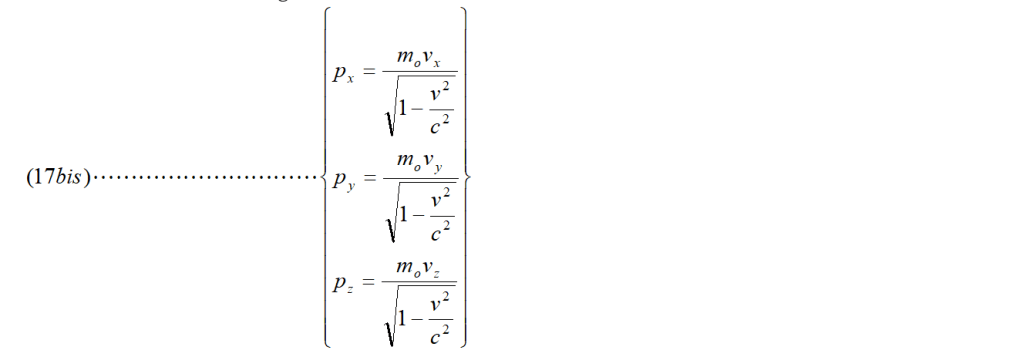
dove risulta : v2 = vx2 + vy2 + vz2 .
Ma ritorniamo un poco indietro su quanto discutevamo qualche riga più su, riprendendo in esame l’urto anelastico tra due masse m che viaggiano in verso opposto con la stessa velocità u (si rivedano le figure 53 e 54 relative, rispettivamente, a prima e dopo l’urto). Dal riferimento S’, nel quale siamo in quiete, vediamo le masse, prima e dopo l’urto, così come illustrato nelle figure 63 e 64. La differenza tra le figure 63 e64 e le figure 53 e 54 è che ora, in luogo dei valori costanti m per la massa, abbiamo posto il valore variabile m(u); inoltre abbiamo indicato con M(0) = Mo la massa risultante dopo l’urto anelastico. Si mostra facilmente che con la nuova definizione di quantità di moto (17) la quantità di moto nell’urto risulta conservata. Vediamolo.
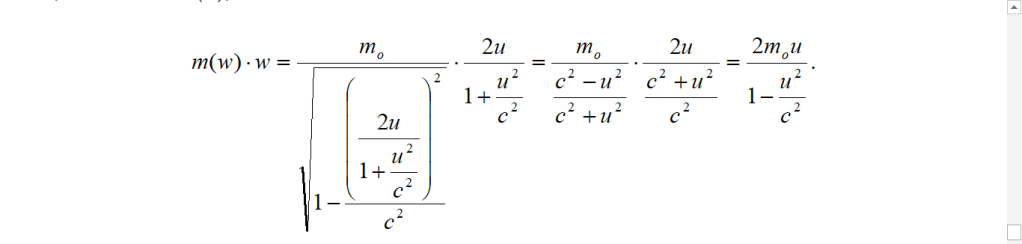
Ricordando la composizione delle velocità, la velocità w della massa che prima dell’urto risulta, in moto rispetto ad S, sarà data da:

avendo composto la velocità u della massa con la velocità u del riferimento S (si noti che la scelta della velocità u per il sistema S è fatta per semplificare i calcoli; in tal caso, infatti, una delle due masse risulta in quiete rispetto ad S).
La quantità di moto osservata da S prima dell’urto sarà (figura 65):
m(w).w + m (0 ).0 = m(w).w
che, ricordando la (l6), diventa:
La quantità di moto osservata da S dopo l’urto sarà (figura 66):

Confrontando le quantità di moto prima e dopo l’urto, si trova:
m(w).w = M(u).u
e cioè:
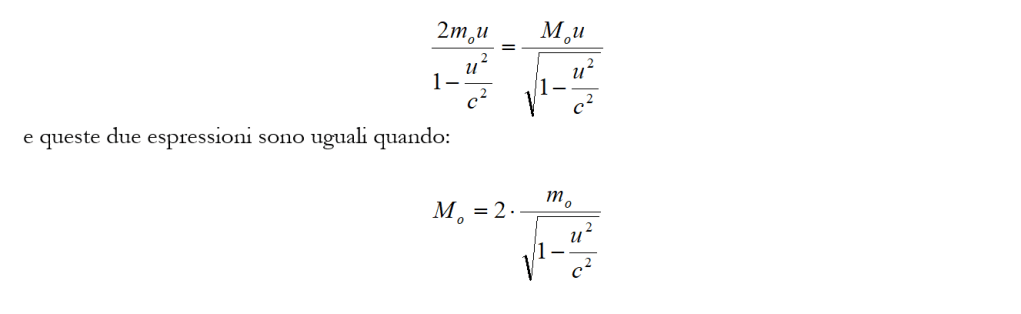
cioè quando:
Mo = 2 m(u).
Quanto trovato vuol dire che gli osservatori su S e su S’ misurano valori diversi per la quantità di moto totale ma, finché la massa e la quantità di moto totali forniscono un valore costante per un osservatore su S’, la quantità di moto totale risulterà costante per un osservatore che si trovi su S, Riguardo all’ultima relazione scritta occorre notare che la somma delle due masse considerate separatamente a riposo è 2mo , mentre la somma delle due masse dopo un urto anelastico è 2m(u). Si vede subito che:
2m(u) > 2mo
e ciò vuol dire che, a seguito di interazioni tra oggetti, la massa classicamente definita non si conserva più. Ora si ha a che fare con la conservazione della massa relativistica che è ben altra cosa ed in particolare non è altro che, come vedremo, un’altra e nuova formulazione della conservazione dell’energia (è l’energia cinetica delle due masse che si urtano a trasformarsi in massa).
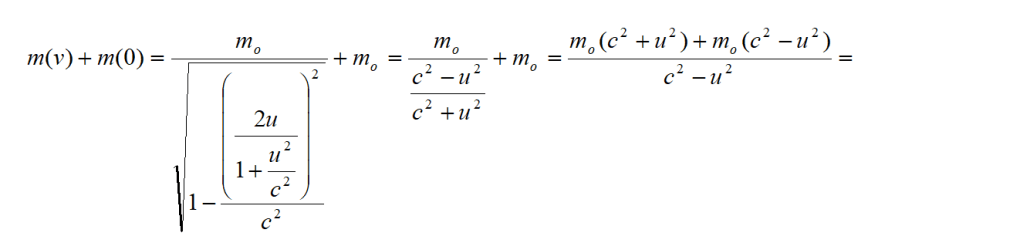
Possiamo estendere questo risultato a tutti i sistemi inerziali sui quali dovrà risultare sempre:
m(w) + m(0) = M(u).
Vediamolo:
Arrivati a questo punto, prima di passare ad altro argomento, è utile precisare alcuni concetti introdotti ed estendere alcuni risultati. Lo vedremo nel prossimo paragrafo.
NOTE
(922) Si ha urto anelastico quando, dopo l’urto, le due masse restano legate insieme formando un’unica massa, somma delle prime due. Esempi di urto anelastico sono: l’urto tra due palline di mastice; una reazione chimica che da due atomi A e B origina un composto AB; un proiettile che si conficca in un blocco di legno; …

Categorie:Senza categoria

Rispondi