Gli articoli di seguito elencati sono tutti in pdf. Per leggerli e scaricarli separatamente occorre andare su PAGINE. Qui andare in DOCUMENTI dove si troveranno i titoli degli articoli che si desiderano leggere per scaricarli.
Equazioni di Maxwell 36
Effetto Doppler classico 154
E’ possibile osservare a contrazione delle lunghezze? 155
Alcune Verifiche Sperimentali 154 – 1
La Costanza Della Velocità Della Luce 154 -1
L‘esperienza Di Michelson E Morley 154 -1
L’esperienza di Fizeau 154 -1
L’aberrazione Stellare 154 -1
I Muoni 154 -1
Il “Paradosso” Dei Gemelli 154 -1
Un Esempio Di Elettrodinamica Relativistica 151
APPENDICI UTILI ALLA LETTURA DEL LAVORO SULLA RELATIVITA’
Campi conservativi 35
Circuitazione di un vettore lungo una linea chiusa. 35
Corrente di spostamento. 35
Angolo solido 38
Passaggio da coordinate cartesiane a coordinate sferiche 38
Distribuzione delle velocità molecolari di Maxwell 38
La curva di Gauss ed alcuni integrali notevoli ad essa collegati 43
LA FORZA DI CORIOLIS
L’ordinaria meccanica da noi studiata è sviluppata su un sistema di riferimento supposto (è una autodefinizione) inerziale. Un sistema inerziale è un sistema in quiete rispetto a noi che osserviamo o un sistema in moto rettilineo uniforme, sempre rispetto a noi che osserviamo .
Se ci poniamo ad osservare una piattaforma ruotante, stando al di fuori di essa, avremo a che fare con tutta la dinamica del moto rotatorio che conosciamo. Ma se ci poniamo sulla piattaforma ruotante o su di un riferimento dotato di moto accelerato, allora la fisica che conosciamo non risponde più poiché nascono delle strane forze delle quali, con l’ordinaria meccanica dei sistemi inerziali, non si sa rendere conto.
Se ricordiamo che su un sistema dotato di moto rotatorio uniforme agisce l’accelerazione centripeta, possiamo in generale dire che: in tutti i sistemi di riferimento dotati di accelerazione le leggi della dinamica non hanno la stessa forma che conosciamo. E quanto detto equivale a dire che i sistemi dotati di accelerazione (sia essa tangenziale che centripeta) non sono sistemi inerziali.
Ebbene, finché guardiamo dall’esterno (stando noi in quiete) un sistema accelerato potremo applicare le ordinarie leggi della dinamica. Quando ci trovassimo su di un sistema dotato di accelerazione, allora dovremmo tener conto di tutte le forze con le quali ci imbattiamo (forze che risulterebbero fittizie guardando dall’esterno un sistema accelerato).
Mettiamoci quindi su di un sistema accelerato ed, in particolare, su di un sistema ruotante. Già sappiamo che su di un tale sistema dobbiamo tener conto di una forza che non compare nei sistemi inerziali, quella centrifuga. Oltre alla forza centrifuga, ve ne è ancora un’altra da dover considerare , quella, appunto, di Coriolis o forza centrifuga composta (lo scienziato francese G.G. Coriolis – 1792/1843 – sviluppò le sue ricerche tra il 1832 ed il 1835 e le pubblicò sul Journal de l’ École polytechnique) . Per capire di cosa si tratta riferiamoci alla figura 1.
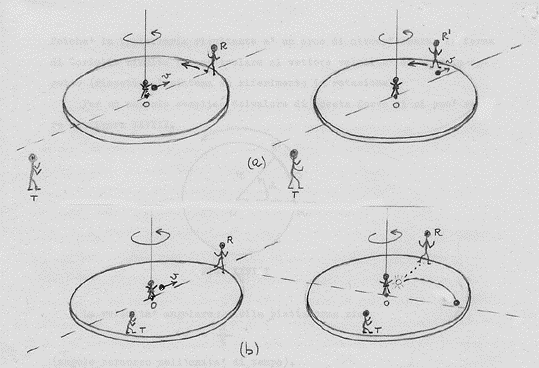
Figura 1
In (a) l’osservatore T si trova fuori della piattaforma. Ad un dato istante il signor O, che si trova sulla piattaforma, lancia una palla ad R, anch’esso sulla piattaforma. T vede che, quando la palla è arrivata nel punto che all’istante del lancio occupava R, quest’ultimo occupa una posizione più avanzata, di modo che la palla non raggiunge R. In (b) l’osservatore T si trova sulla piattaforma. La piattaforma in rotazione non modifica le posizioni relative di T, O ed R. Quando O lancia la palla verso R, allo stesso modo di prima, la palla non raggiungerà R; solo che ora R è fermo rispetto a T e T non potrà far altro che concludere che la palla lanciata da O ha seguito la traiettoria indicata in figura.
La forza di Coriolis, che compare solo su oggetti in moto su sistemi in rotazione, è la forza responsabile della deviazione della traiettoria di un oggetto dalla sua traiettoria inerziale (occorre notare che su oggetti immobili in sistemi in rotazione, per un osservatore su uno di questi sistemi, agisce solo la forza centrifuga). Poiché la traiettoria risultante è un arco di circonferenza, la forza di Coriolis risulta perpendicolare al vettore velocità di un dato oggetto (rispetto al sistema di riferimento in rotazione).
Per un calcolo semplice del valore di questa forza ci si può servire di figura 2.
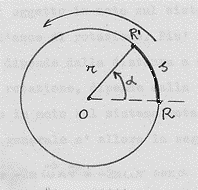
Figura 2
La velocità angolare ω della piattaforma sia ω = a/t.
Osservando che l’arco s percorso sta alla lunghezza della circonferenza (2πr) come l’angolo α percorso sta a 360°, si trova che:
s = α r.
Poiché dall’altra relazione si ricava che α = ωt, risulterà:
s = ω t r.
Ed s è l’arco che il punto R percorre, per arrivare ad R’, nel tempo t necessario affinchè la palla, lanciata da O con velocità v percorra il tragitto r (il raggio della piattaforma). Abbiamo quindi anche:
r = v t.
Sostituendo questa espressione nella precedente, si trova:
s = ω t (vt) = ω v t2 = 1/2 (2 ω v) t2 = 1/2 ac t2
avendo posto ac = 2 ωv accelerazione di Coriolis.
Possiamo quindi iniziare a concludere che s è la deviazione che l’osservatore T, che si trova sul sistema in rotazione, osserva per l’oggetto che è stato lanciato da O in direziono radiale. Per s si trova un’espressione che fornisce proprio lo spazio percorso in un moto uniformemente accelerato quando si ponga ac = 2 ωv.
Per trovare la forza di Coriolis non dobbiamo far altro che utilizzare la definizione di forza dataci dal 2° principio della dinamica:
F = mac = 2 mωv
Quello che abbiamo fin qui ricavato è valido nel caso semplice in cui la velocità dell’oggetto in moto sul sistema rotante ha una. direzione perpendicolare all’asse di rotazione. Più in generale la forza di Coriolis, mentre non dipende dalla distanza a cui l’oggetto si trova rispetto all’asse di rotazione, dipende dalla velocità (valore assoluto e verso) dell’oggetto in moto sul sistema rotante.
La formula più generale è allora la seguente:

dove: ω e’ la velocità angolare del sistema rotante rispetto ad un sistema inerziale; m è la massa e v è la velocità dell’oggetto in moto rispetto al sistema rotante; il vettore ω è il vettore rotazione definito in modo da essere diretto secondo l’asse di rotazione e tale che, rispetto ad esso, la rotazione avvenga in verso antiorario; α è l’angolo formato tra il vettore rotazione ed il vettore velocità v dell’oggetto in moto; il segno meno sta ad indicare il fatto che la deviazione sovviene in verso contrario a quello del moto del sistema rotante.
Questa forza risulta sempre perpendicolare all’asse di rotazione (al vettore rotazione) ed al verso del moto del nostro oggetto
Fu F. Reich (1799 – 1882) che nel 1833 verificò per primo quanto trovato da Coriolis. Facendo cadere grosse masse in un pozzo verticale, profondo 158 m, trovò delle deviazioni dalla verticale di 28 mm verso est. Questo fatto basta per riconoscere la non inerzialità del sistema Terra (si tenga conto che, poiché la Terra è una sfera in rapida rotazione, e non una piattaforma, il fenomeno di deviazione avviene sia per moti che si svolgono sulla superficie della Terra, sia per moti di caduta dei corpi).
Con la forza di Coriolis si possono spiegare altri svariati fenomeni tra cui: il fatto che i cicloni osservati dai satelliti hanno verso antiorario nel nostro emisfero ed orario in quello australe (la stessa cosa accade per il vortice che l’acqua fa uscendo dallo scarico di un lavandino); il fatto che i venti alisei vengono deviati verso occidente; il fatto che nel nostro emisfero le rive destre dei fiumi e le rotaie destre (rispetto al verso del moto) sono le più consumate; il fatto che se si spara a grande distanza su un bersaglio, senza tener conto della deviazione di Coriolis, non lo si colpisce; la famosa esperienza (1851) del pendolo di Foucault.
LE GEOMETRIE NON EUCLIDEE
Il quinto postulato di Euclide, nella forma datagli da Proclo (5° secolo d. C), così recita:
“Per un punto non giacente su una retta passa, nel loro piano, una sola parallela ad essa“.
Per secoli ci si era impegnati a trovare una qualche dimostrazione di questo postulato finché, agli inizi dell’ 800, si riuscì a provare l’impossibilità di dimostrarlo.
Coloro che dettero il più rilevante contributo a questa impresa furono il matematico ungherese Janos Bolyai (1802 – 1860) ed il matematico russo Nikolaj I. Lobacevskij (1793-1853) negli anni che vanno dal 1823 al 1855 [il primo che provò a trarre le conseguenze della negazione del 5° postulato fu il matematico italiano G. Saccheri (1677 – 1733) nel 1733. Si noti inoltre che già Gauss (1777 – 1855) aveva elaborato studi molto avanzati nella costruzione di geometrie che partissero dalla negazione del 5° postulato, ma non li pubblicò].
Alla geometria da loro indipendentemente costruita si dà il nome di geometria iperbolica. Questa geometria è una delle possibili geometrie non-euclidee, nel senso che viene costruita a partire dalla sostituzione del quinto postulato di Euclide con quest’altro:
“Tutte le linee rette poste in un piano ed irradiantesi da un punto possono, in rapporto ad ogni altra retta del piano, essere divise in due classi: quelle che intersecano e quelle che non intersecano l’altra retta considerata. La linea che separa le due classi dicesi parallela alla retta, data.”
La figura 1 può servire ad illustrare il postulato. Secondo la geometria euclidea, r’ (perpendicolare alla perpendicolare tracciata per P alla retta r) è l’unica parallela alla retta r. Secondo la geometria iperbolica tra le rette del
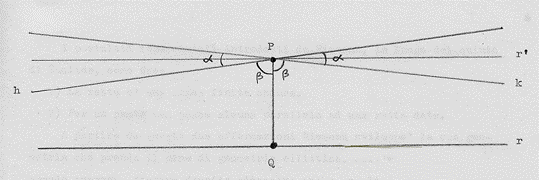
Figura 1
fascio per P ve ne sono due, h e k, che separano le rette che vanno a secare r da quelle che non vanno a secare r. Queste due sono rette parallele alla retta r passanti per il punto P. Si noti che queste rette hanno ciascuna un suo verso di parallelismo: k ha verso destro mentre h ha verso sinistro. Si noti inoltre che anche tutte le rette comprese nell’angolo a (e sempre passanti per P) non sono secanti la retta r.
E’ evidente che il parallelismo (nel verso destro) di k con r, come il parallelismo (nel verso sinistro) di h con r, è asintotico. Gli angoli b di figura, sono chiamati angoli di parallelismo.
Ora, caratteristica della geometria iperbolica, è che l’angolo a è acuto (in quella euclidea era retto). Si vengono quindi a modificare quelle conclusioni della geometria euclidea che discendevano dal postulato delle parallele. In particolare risulta ora che la somma degli angoli interni di un dato triangolo non è più uguale a due angoli retti ma è minore di questa quantità (vedremo tra breve – figura 3 – dei disegni illustrativi di un tal triangolo e degli altri possibili).
Per concludere su questa geometria occorre dire che tanto per Bolyai che per Lobacevskij la geometria euclidea si ottiene come caso limite della geometria iperbolica quando ci si riferisca al ristretto spazio nel quale sulla Terra si svolgono le nostre esperienze.
Su strade diverse, ma sempre non-euclidee, si mosse qualche anno più tardi il matematico tedesco Bernhard Riemann (1826 – 1866). Nello sviluppare una geometria differenziale egli ebbe modo di introdurre un nuovo tipo di geometria non-euclidea (il lavoro è del 1854 ma fu pubblicato postumo nel 1868).
I postulati fondamentali introdotti da Riemann, in luogo del quinto di Euclide, sono due:
1) La retta è una linea finita chiusa.
2) Per un punto non passa alcuna parallela ad una retta data.
A partire da queste due affermazioni Riemann sviluppò la sua geometria che prende il nome di geometria ellittica. Nell’elaborare la sua grande impresa, Riemann dovette attaccare anche un altro dei postulati di Euclide, quello che afferma che per due punti si può condurre una sola retta.
Per capire quanto qui sostenuto occorre dire che la geometria di Riemann è relativa a superfici con curvatura costante (vedi più avanti). Una di queste superfici è certamente la sfera alla quale ci riferiremo. Pensiamo una circonferenza tracciata su una sfera di raggio infinito: abbiamo una retta in senso euclideo. Riducendo il raggio di questa sfera ci troviamo nelle condizioni di Riemann ed una circonferenza su di una sfera di raggio finito è una retta nel senso di Riemann.
Su una sfera, quindi, per due punti si può far passare una retta ed una sola (una circonferenza nell’accezione Euclidea). Ma se questi punti si trovano agli estremi di un diametro della sfera per essi possono passare infinite rette. Una conseguenza della geometria ellittica è che, sempre riferendoci al nostro esempio della sfera, la somma degli angoli interni di un triangolo è maggiore di due angoli retti. Per capire quest’ultima affermazione, anche per confronto con la geometria euclidea e quella iperbolica, riferiamoci alla figura 2. Nella figura 2 a è rappresentato un piano euclideo che
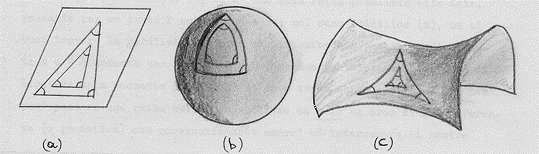
Figura 2
ha una curvatura nulla e di conseguenza la somma degli angoli interni di un triangolo è uguale a due angoli retti (geometria euclidea). Nella figura 2 b è rappresentata una. sfera, superficie a curvatura costante positiva, sulla quale la somma degli angoli interni di un triangolo è maggiore di due angoli retti (geometria ellittica). Nella figura 2 c è rappresentata una superficie a sella, superficie che non ha curvatura costante e che, anzi, ha una curvatura negativa, sulla quale la somma degli angoli interni di un triangolo è minore di due angoli retti (geometria iperbolica; si noti a margine che la rappresentatività di questa geometria fu dimostrata per la prima volta dal matematico italiano E. Beltrami – 1835/1900 – nel 1868).
Già che abbiamo iniziato a confrontare con disegni le tre geometrie in oggetto, facciamo ancora dei confronti. Pensiamo ad esempio ai triangoli simili della geometria euclidea. Sempre aiutandoci con la figura 2, si può vedere che, nel caso euclideo (a) si può parlare di triangoli simili; nel caso ellittico (b) la somma degli angoli interni di un triangolo risulta più grande quanto più grande è il triangolo; nel caso iperbolico (e) la somma degli angoli interni di un triangolo diventa sempre più piccola quanto più il triangolo ingrandisce.
Riguardo alla questione che più direttamente riguarda il quinto postulato con quelli che lo hanno sostituito, si può vedere figura 3.
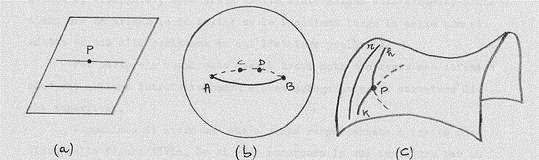
Figura 3
Nel caso euclideo (a) vi e’ una sola retta, parallela alla data, passante per un punto P esterno ad essa; nel caso ellittico (b), se si vuo trovare la parallela all’arco di circonferenza passante per i punti A e B e passante per i punti C e B (ambedue equidistanti dall’arco di circonferenaa passante per A e B) si deve tener conto che per C e D non può passare una retta nel senso euclideo ma solo un arco di circonferenza o geodetica) che necessariamente andrà ad intersecare il nostro arco passante per A e B (si noti che la linea tratteggiata sta sulla faccia della sfera a noi offerta); nel caso iperbolico (c) si vede subito che di rette parallele alla retta r data ve ne sono certamente due (h e k) e poi tutte quelle comprese nell’angolo formato dai prolungamenti delle due rette.
C’è poi da aggiungere che nel caso euclideo (a), una data distanza (segmento ordinario) si conserva, qualunque spostamento facciamo fare ai due punti che delimitano questa distanza; nel caso ellittico (b) vale la stessa proprietà, con l’avvertenza che ora la distanza è rappresentata da una geodetica; nel caso iperbolico (c) questa proprietà non si mantiene più e si dovranno considerare, via via che ci spostiamo sulla sella, delle distanze diverse.
Per capire meglio ciò si può pensare di ritagliare su un pezzo di carta un triangolo euclideo: se lo facciamo scorrere su di un piano non incontriamo alcun problema; facciamo la stessa operazione con un triangolo di buccia d’arancia su di un’altra arancia: dovunque spostiamo il triangolo, esso trova esatta sistemazione sull’arancia; prendiamo ora un triangolo di sella: se lo spostiamo lungo la sella non si adatta se non alla posizione da cui l’abbiamo prelevato.
Per.portare a compimento queste brevi note non resta che definire ciò che abbiamo introdotto senza alcuna spiegazione: la curvatura di una superficie.
Supponiamo di avere una curva piana rappresentata a tratto continuo nella figura 4 a. Se si vuol conoscere la sua curvatura per un arco (infinitesimo) compreso tra i punti A e B non si deve far altro che considerare la circonferenza
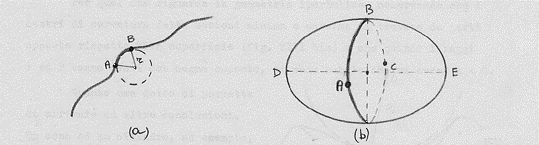
Figura 4
che abbia nell’arco come suo arco e quindi fare l’inverso del raggio di questa circonferenza. Cosicché la curvatura k dell’arco AB sarà k = 1/r.
Nel caso più generale di una superficie le cose si complicano, anche se Euler ha dimostrato un teorema che facilita di molto le cose. Riferiamoci ad un ellissoide (la sfera è un caso particolare di ellissoide), quello riprodotto in figura 2 b. Se vogliamo calcolare la curvatura della superficie in un suo punto P bisognerà trovare tutte le sezioni perpendicolari all’ellissoide passanti per P: ciascuna di queste sezioni rappresenterà una linea con propria curvatura (nel nostro caso è evidente che la curvatura della sezione passante per DBE è inferiore a quella della sezione per ABC). Ebbene, tra queste sezioni, ve ne sarà una con curvatura massima ed una con curvatura minima; Euler ha dimostrato che le curvature massima e minima corrispondono a sezioni tra loro perpendicolari. Con ciò, se r e’ il raggio della circonferenza che meglio approssima la curvatura minima (in P) ed R il raggio della circonferenza che meglio approssima la curvatura massima, (in P), per la curvatura in P vale la relazione: k = 1/Rr. Si vede subito che al tendere ad infinito di una sola delle quantità a denominatore, k risulta nulla.
La geometria euclidea, approssimazione di una geometria su una sfera di raggio infinito, presenta k = 0 .
La geometria ellittica avrà k > 0.
Per quel che riguarda la geometria iperbolica, osservando che i centri di curvatura delle sezioni minima e massima si trovano da parti opposte rispetto alla superficie (figura 5) e che quindi i raggi r ed R vanno presi con segno opposto, si vede subito che si avrà k < 0.
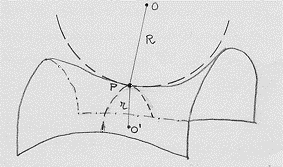
Figura 5
Quanto ora detto ci permette di arrivare ad altre conclusioni. Un cono od un cilindro, ad esempio, presentano k = 0, poiché mentre r è uguale ad un numero qualunque, R è certamente infinito (infatti se si fa una sezione, passante per un punto P sulla superficie e parallela alla base di un cono o di un cilindro all’altezza che si vuole, si troverà una data curvatura legata al raggio r della circonferenze, ottenuta, come sezione; ma se si fa la sezione perpendicolare a questa prima., sempre per P, si trova un rettangolo od un triangolo (ordinari) a seconda che si abbia il cilindro od il cono; per P passerà ora una retta, con curvatura nulla, che e’ quindi assimilabile ad una circonferenza di raggio R che vale infinito). Allora per cilindro e cono si ha k = 0, come nel caso delle superfici euclidee piane. Ebbene si dimostra facilmente che superfici che abbiano uguale curvatura sono applicabili l’una all’altra, di modo che se ritagliamo un cono od un cilindro di carta possiamo farlo aderire perfettamente ad un piano; e questa operazione non ci è possibile realizzarla né con una sella né con una sfera perché il k del piano vale zero mentre il k di queste ultime figure geometriche è diverso da zero (per il caso della sfera si può pensare all’impossibilità di riprodurre con esattezza la Terra su di una. carta geografica).
Ho solo dato qualche cenno che però mi pare sufficiente per poter concludere che letteralmente si aprono nuovi mondi.
Questi mondi troveranno sviluppi e rappresentazioni nei lavori di F.Klein (1894-1925), di H.Minkowskij (1864-1909) e di D.Hilbert (1862-1943).
Non a caso le cosmologie, prima fra tutte quella di Einstein, prendono le mosse da queste geometrie (in particolare Einstein elaborerà la sua relatività generale utilizzando la geometria ellittica di Riemann.
LE FLUTTUAZIONI
Per parlare di fluttuazioni occorre riferirsi al significato statistico del 2° principio della termodinamica.
Dalla teoria cinetica sappiamo che la temperatura e la pressione costituiscono medie nel tempo di un gran numero di caratteristiche microscopiche di un dato gas (in particolare la temperatura di un dato gas è proporzionale all’energia cinetica delle sue molecole o, meglio, alla velocità quadratica media con cui queste si muovono). Abbiamo poi visto, nell’ultimo paragrafo del 3° capitolo di Relatività, il significato statistico che si deve attribuire al 2° principio della termodinamica (dovuto al fatto che si ha a che fare con un numero N enorme di molecole costituenti il gas, dell’ordine di grandezza del numero di Avogadro), Ricordo una frase di Boltzmann che abbiamo citato nel paragrafo in oggetto: “Lo stato iniziale di un sistema sarà, nella maggior parte dei casi, uno stato molto poco probabile ed il sistema tenderà sempre verso gli stati più probabili, fin quando giunge allo stato più probabile, cioè allo stato di equilibrio termodinamico. Se applichiamo questo al secondo principio della termodinamica, potremo identificare la grandezza entropia con la probabilità dello stato corrispondente“.
Poiché lo stato più probabile di un sistema termodinamico è lo stato macroscopico che è realizzato dal maggior numero di stati microscopici, un sistema isolato tenderà all’equilibrio termodinamico che è proprio quello cui compete la massima probabilità o, che è lo stesso, la massima entropia.
Lo stesso Boltzmann trovò una relazione che lega l’entropia S di un dato stato macroscopico alla sua probabilità P di esistenza:
(1) S = k log P
dove k è, appunto, la costante di Boltzmann.
Si badi che, cosi formulato il 2° principio della termodinamica continua ad affermare la reversibilità delle leggi meccaniche che governano le interazioni tra le molecole; esso dice però che, nei fenomeni naturali, questa reversibilità è estremamente improbabile. Ed è su questa improbabilità che centreremo la nostra attenzione per discutere di fluttuazioni.
Supponiamo di avere N molecole di un gas cui compete una energia totale E; è ovvio che vi sono svariatissimi modi in cui le N molecole possono ripartirsi l’energia a disposizione in modo che, macroscopicamente, si abbiano sempre gli stessi valori P, V, T, di pressione, volume, temperatura (in modo cioè che si abbia sempre lo stesso stato macroscopico). E’ ragionevole però ammettere che questa energia E si distribuisca tra le molecole in modo che, più o meno, tutte acquistino una certa energia e quindi una certa velocità. E’ stato Maxwell a mostrare ciò teoricamente (si veda Appendice 5) e Stern a verificarlo sperimentalmente (nel 1920).
Le velocità delle molecole si distribuiscono secondo la curva mostrata in figura (una gaussiana). Questa curva ha il seguente significato: le molecole del gas sono in continuo movimento e soggette agli urti più svariati (tra di esse e con
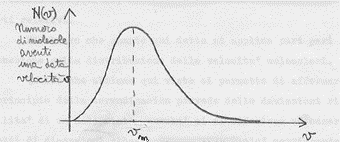
le pareti del recipiente che le contiene); ad ogni istante si avrà un numero enorme di valori di v; poche molecole avranno velocità molto piccole (la coda sinistra della gaussiana); poche molecole avranno velocità molto grandi (la coda destra della gaussiana); un grandissimo numero avrà velocità intermedie; la curva presenta un massimo in corrispondenza di vm che può essere assunta come la velocità più probabile delle molecole; per vm Maxwell ha trovato il valore:

dove T è la temperatura assoluta cui si trova, il gas, m è la massa di una molecola (le masse delle molecole del gas sono supposte tutte uguali), k è la costante di Boltzmann [si noti che il valore ora dato deve essere leggermente corretto data la non perfetta simmetria della curva: vo ≈ 1,13 vm].
Il calcolo delle probabilità mostra anche un altro importante risultato. Se in un recipiente di volume dato vi sono N (numero di Avogadro) molecole di gas e noi preleviamo la metà del volume di gas, esso conterrà un numero di molecole pari a N/2 ± h, dove h rappresenta lo scarto assoluto rispetto alla metà di N. Sempre il calcolo delle probabilità ci permette di ricavare che la probabilità che corrisponde ad un dato scarto assoluto h è proporzionale a radice quadra di N (la probabilità che questo scarto sia superiore a 100 volte la radice quadrata di N è pari ad 1/1014 !!!). Se definiamo con h/N lo scarto relativo, la probabilità di esso sarà data da:

Al crescere di N, quindi, cresceranno gli scarti assoluti ma diminuiranno gli scarti relativi.
E’ chiaro che quanto qui detto si applica pari pari alla precedente discussione sulla distribuzione delle velocità molecolari.
Quello che abbiamo visto ci permette di affermare che lo stesso 2° principio della termodinamica prevede delle deviazioni rispetto alla probabilità di un dato stato purché ci si riferisca ad osservazioni fatte su oggetti di dimensioni abbastanza piccole. E ciò è verificato da osservazioni sperimentali. Si definirono fluttuazioni le deviazioni che una data grandezza osservabile presenta rispetto al suo valore più. probabile. Il secondo principio è dunque valido sempre di più quanto più è grande il numero N di componenti il sistema termodinamico in considerazione. Viceversa, al decrescere di N, le fluttuazioni diventano sempre più probabili (nel caso limite in cui si consideri una sola molecola di un gas, essa può venir urtata da una molecola più lenta di modo che la sua velocità aumenta e, come sappiamo, ciò corrisponde ad un suo aumento di temperatura a danno di una molecola più fredda fatto quest’ultimo che contraddice il 2° principio della termodinamica). Se si dispone di un gas molto rarefatto in un volume molto piccolo è possibile rilevare sperimentalmente differente di temperatura tra punti diversi del volume occupato dal gas. Lo studio quindi delle fluttuazioni è lo studio di quella parte del 2° principio che non è certezza. Per loro definizione, le fluttuazioni contraddicono questo principio. Il moto browniano è un esempio di fluttuazioni. Attraverso lo studio di esse è stato possibile spiegare il colore azzurro del cielo e ricavare, per una via differente, il valore del numero N di Avogadro.
Categorie:Albert Einstein

Rispondi