Roberto Renzetti
(2004)
PREMESSA
L’idea di scrivere queste pagine e di riprendere, ripescandovi, un mio vecchio lavoro del 1982, scritto per la pubblicazione da Savelli, proprio quando Savelli fallì, rinasce con la cattiva informazione che su alcune delle cose che intendo dire si ebbe un anno fa, in occasione del black out elettrico. Le cose oggi, rispetto al 1982 sono cambiate di molto. All’epoca il sistema elettrico era di Stato, oggi è in mano ad un monopolio strozzino. All’epoca discutevo di queste vicende a seguito del fatto che venivano diffuse cattive informazioni per poter entrare nell’affare nucleare. Oggi, sotto questo aspetto è cambiato poco: si danno cattive informazioni per poter continuare a lucrare risparmiando su molte delle cose di cui un sistema elettrico DEVE disporre.
Debbo iniziare da alcuni concetti base di elettricità e magnetismo. Salterò il più possibile ogni cosa che è normale informazione di un testo a livello secondario (nell’ipotesi ottimistica che qualcuno abbia, ai nostri tempi, letto qualcosa su quei libri e non abbia invece dedicato quel tempo a preparare un percorso sull’Isola dei famosi). Discuterò solo di ciò che ritengo informazione indispensabile e propedeutica a quanto seguirà.
LA CORRENTE ELETTRICA ALTERNATA
La corrente elettrica continua è certamente molto utile in diverse applicazioni ma di gran lunga la più usata, oggi è la corrente alternata (c.a.). Più del 90% della corrente che oggi si usa nel mondo è di tipo c.a.. I motivi del maggior uso di c.a. sono essenzialmente due. Il primo risiede nel fatto che essa può essere trasportata più facilmente e più a buon mercato dal luogo di produzione al luogo di utilizzo (e questo soprattutto perché, come vedremo, essa può venire “trasformata”). Il secondo è che la c.a. è più versatile e può avere usi ed applicazioni per le quali non potrebbe essere utilizzata la corrente continua c.c. (ad esempio nel campo delle radio e telecomunicazioni).
Il fenomeno alla base della corrente alternata fu scoperto da Faraday nel 1831 e va sotto il nome di induzione elettromagnetica. Faraday scoprì che quando si muove un magnete nelle vicinanze di un circuito elettrico (senza generatore) in questo circuito circola una corrente che alternativamente si muove in un verso e quindi in quello opposto. Allo stesso modo si ottiene corrente indotta quando, anziché muovere un magnete nelle vicinanze di un circuito, muoviamo il circuito nelle vicinanze del magnete (in definitiva ciò che interessa è il moto relativo di magnete e circuito).
Se quindi otteniamo corrente indotta in un circuito quando rispetto ad esso c’è il movimento di un magnete, evidentemente dovremo avere ai capi del circuito una tensione responsabile della circolazione di corrente. Per capire meglio, comunque, serviamoci
Figura 1
della figura 1 in cui è riportata una semplicissima macchina che rappresenta, nella sua forma più semplificata, un generatore di corrente alternata. Si ha un magnete permanente di tipo a ferro di cavallo o ad U dentro il quale vi è un circuito elementare (un filo metallico, a forma di rettangolo) che ha le estremità saldate a due cilindretti metallici. I cilindretti (che nel loro insieme si chiamano collettore) sono poggiati fermamente su due placchette metalliche S ed S’ che, tramite un filo conduttore, chiudono su uno strumento di misura di piccole correnti, un galvanometro G. Se mediante una manovella si pone in rotazione la spira rettangolare (intorno al suo asse passante attraverso i cilindretti) vedremo l’indice di G muoversi alternativamente verso destra e verso sinistra. Ciò vuol dire che dentro la spira rettangolare circola corrente, prima in un verso quindi nel verso opposto (poiché la corrente è in prima approssimazione un moto di elettroni, il passaggio di corrente in un verso ed in quello opposto, vuol solo dire che gli elettroni della spira oscillano alternativamente in un verso ed in quello opposto. Questa è una corrente alternata elementare che cessa se cessiamo di far ruotare la spira dentro il campo magnetico del magnete ad U (osservo che, se al posto di G sistemassimo un misuratore di differenza di potenziale o tensione o forza elettromotrice V, troveremmo che, come per la corrente, anche la tensione avrebbe un andamento oscillante). Se ai due capi della spira ruotante si collega un utilizzatore (nel nostro caso una piccola lampadina) avremo che tale lampadina si illuminerà fintantoché ruoteremo la manovella con sufficiente energia. Stesso effetto si ha se, come detto, invece di far ruotare la spira e mantenere il magnete fisso, facciamo ruotare il magnete e manteniamo la spira fissa (è appena il caso di dire che, al posto del magnete, ha effetti molto più vistosi un elettromagnete). Dico subito che l’energia elettrica che abbiamo generato nasce a spese dell’energia meccanica che si impiega per girare la manovella (nessuno si illuda, la creazione di un qualcosa dal nulla è solo questione metafisica). Vediamo più in dettaglio quali sono le grandezze in gioco e come varia la corrente (e la tensione) al variare della posizione della spira (indotto o rotore se è essa a muoversi) dentro il campo magnetico del magnete (induttore o statore se è esso a essere mantenuto immobile).
Per fare le cose annunciate, occorre iniziare con il dare il concetto di flusso (che si indica con la lettera greca F – leggi fi). E’ a tutti noto che, nelle vicinanze di un magnete, esiste una zona in cui si risente l’azione del magnete stesso. Questa zona è chiamata campo magnetico e la sua intensità, che si indica con B (più precisamente sarebbe H ma B è proporzionale ad H), varia al variare delle caratteristiche del magnete. Un modo schematico di rappresentare la situazione è con delle linee, dette linee di forza, che rappresentano le linee lungo cui si esercita o si eserciterebbe l’azione del magnete. Maggiore è l’intensità del magnete e più linee di forza rappresentano, in un disegno schematico, il suo campo. Il verso di tali linee è, convenzionalmente, quello che va dal Nord al Sud del magnete (figure 2 e 3).
Figura 2: Le linee di forza del campo magnetico nel caso di un magnete ad U.
Figura 3: la spira ruotante dentro il campo B del magnete.
Quando poniamo in un campo magnetico un conduttore avvolto a spira, la sua superficie sarà attraversata da un maggiore o minore numero di linee di forza (flusso) a seconda dell’inclinazione della spira rispetto alle linee di forza stesse, a seconda dell’estensione della superficie della spira ed a seconda dell’intensità del campo magnetico (poiché più intenso è il campo, maggiore è il numero delle linee di forza che lo rappresenta).
Dato allora un campo magnetico costante e fissata una spira di data superficie che ruota nel campo, il flusso delle linee di forza del campo magnetico attraverso la superficie della spira varierà al variare dell’inclinazione della spira stessa rispetto alle linee di forza del campo. Ebbene proprio questa variazione di flusso è responsabile dell’ originarsi ai capi della spira di una tensione che sarà tanto più grande quanto maggiore è la variazione di flusso e, aggiungo, quanto minore è il tempo in cui la variazione di flusso è stata ottenuta; e nel moto della spira nel campo magnetico la tensione ai capi della spira non assumerà valore costante ma varierà in relazione alla variazione di flusso. Più in particolare la tensione in oggetto: sarà nulla nell’istante in cui la spira risulta perpendicolare alle linee di forza del campo, quando cioè il flusso è massimo; sarà massima nell’instante in cui la spira risulta parallela alle linee di forza del campo, quando cioè il flusso è nullo; assumerà valori intermedi quando la spira si trova a formare un angolo compreso tra 0 e 90 gradi con le linee di forza del campo. Quindi il passaggio tra il valore zero ed il valore massimo della tensione (quando la spira è ruotata di 90°) non avverrà in modo netto ma graduale nel tempo, come mostrato in figura 4a (a rappresenta l’angolo percorso dalla rotazione della spira mentre t il tempo impiegato dalla spira nel ruotare). Una volta poi che la tensione ha raggiunto valor massimo essa ritornerà di
Figura 4: ho evidenziato un lato della spira in modo da far seguire meglio il suo moto.
nuovo a zero poiché la spira continua a ruotare e quindi di nuovo (dopo aver ruotato di 180°) si troverà perpendicolare alle linee di forza del campo (fig. 4b). A questo punto le cose riprendono come prima ma con una importante osservazione. Ora le linee di forza del campo, che prima entravano da un lato della superficie della spira, entrano dal lato opposto della stessa, superficie (fig. 4b). Si avrà allora sempre una crescita della tensione dal valore zero al valore massimo (la spira è ruotata di 270°) ma questa volta in senso negativo (fig. 4c). Proseguendo la rotazione la spira si troverà di nuovo perpendicolare (la spira è ruotata, di 360°: un giro completo) alle linee di forza ma questa volta esattamente come si trovava all’inizio del processo: avremo quindi di nuovo tensione nulla ma saremo pronti a ricominciare il tutto esattamente allo stesso modo visto fino ad ora man mano che continua la rotazione della spira.

Figura 4
Un andamento della tensione come quello riportato in figura 4d è chiamato sinusoidale. E la tensione ottenuta dalla rotazione di una spira in un campo magnetico è chiamata alternata perché passa successivamente da valori positivi a valori negativi proprio con andamento sinusoidale (al contrario di quanto avviene per la tensione continua la quale mantiene costante nel tempo il suo dato valore).
Ora è chiaro che ad ogni giro completo della spira nel campo del magnete si genererà una figura completa come quella di figura 4d; pertanto, all’aumentare del numero dei giri della spira, si avrà una figura come quella riportata in 5.

Figura 5: Una sinusoide che rappresenta tre giri completi della spira nel campo (con V ho indicato la tensione ai capi della spira).
Come abbiamo visto, una rotazione completa della spira corrisponde al primo tratto nero di figura 5. A questo tratto si dà il nome di periodo o ciclo. Poiché la spira fa in genere più giri al secondo è importante definire la frequenza di una tensione alternata che corrisponde appunto al numero dei cicli al secondo. Si pensi che la tensione alternata, che comunemente usiamo in Italia, fa 50 cicli al secondo. Poiché poi alla quantità “ciclo al secondo” si da il nome di Hertz (Hz), si dice che la tensione di rete ha una frequenza di 50 Hz.
Altre grandezze che vanno definite sono l’ampiezza e la lunghezza d’onda. Sempre riferendoci alla figura 5, la distanza tra A e B (tra il massimo positivo ed il massimo negativo) di figura, rappresenta l’ampiezza della sinusoide che ci dà la nostra tensione alternata, mentre la distanza tra C e D (tra due punti qualunque che delimitano un ciclo) rappresenta la 1unghezza d’onda della tensione in oggetto. Resta da parlare della fase, per quanto ci servirà in seguito.
Supponiamo di avere due generatori di tensione alternata che partano allo stesso istante e facciano girare le loro spire esattamente alla stessa velocità. Le due sinusoidi che rappresentano le due tensioni prodotte cominceranno e finiranno simultaneamente così come passeranno per i loro punti caratteristici, di massimo e di zero, allo stesso tempo (fig. 6). Due tensioni prodotte in questo modo con loro curve come in figura 6 si
Figura 6: due tensioni (V) o correnti (i) in fase tra di loro (sull’asse orizzontale è riportato l’angolo di rotazione della spira (a) o il tempo (t) che essa impiega a percorrere tale angolo.
dicono in fase. Se invece le tensioni hanno un andamento come quello mostrato in figura 7, allora le due tensioni si dicono semplicemente sfasate l’una rispetto all’altra. Osservo a
Figura 7: due tensioni (ma potrebbero essere correnti o tensioni e correnti) sfasate di un angolo φ.
parte una cosa forse ovvia: affinché due tensioni (o correnti) siano in fase non è necessario che abbiano stesse ampiezze (fig. 8). La fase viene indicata con la lettera
Figura 8
greca minuscola φ (leggi fi). Quando due sinusoidi sono in fase si dice che φ = 0; quando sono sfasate φ assume un valore compreso fra 0° e 90° ( l’indicare la fase con i gradi è in accordo col mettere in relazione una sinusoide con l’inclinazione della spira nel campo magnetico).
Vedremo subito a cosa ci è servito parlare di fase. Un generatore di tensione alternata se collegato ad un utilizzatore qualunque fa circolare in esso una corrente che sarà allo stesso modo alternata. La corrente alternata avrà generalmente un’ampiezza diversa da quella della tensione allo stesso modo che fase diversa (ci troviamo nelle condizioni di figura 7 con la sola differenza che, in luogo di V2, si deve leggere I1 (figura 9).
Figura 9: Sfasamento che in generale si ha tra tensione e corrente.
La differenza di ampiezza tra tensione e corrente non crea problemi di sorta (fig. 10 ed 11)
Figura 10
Figura 11: Varie situazioni di sfasamenti tra tensioni e correnti alle quali faremo riferimento in seguito:
a – tensione e corrente sono in fase
b – corrente in ritardo di 90° rispetto alla tensione
c – corrente in anticipo di 90° rispetto alla tensione
d – corrente in opposizione di fase rispetto alla tensione
e – corrente e tensione sfasati in un modo qualunque
ma la differenza di fase si riflette direttamente sulla potenza che il generatore può erogare, cioè su quella cosa che noi in definitiva dobbiamo utilizzare. Per vedere come stanno le cose e definire altre grandezze, partiamo con una domanda. Poiché la tensione e la corrente sono alternate, dovendo noi dare un numero che ci dica qual è la tensione o la corrente, che numero diamo se appunto i loro valori variano nel tempo? Nel calcolo delle correnti di uscita di un generatore sarebbe ovviamente errato usare il valore massimo (Imax) della corrente poiché per la gran parte dell’intero ciclo la corrente si mantiene più bassa del valore massimo (Imax). Si è allora introdotta una grandezza, il valore efficace, che tra l’altro ha il grande vantaggio di mettere in relazione la c.a. con la c.c. Si definisce valore efficace di una corrente alternata (Ieff ) il valore che dovrebbe avere una corrente continua, per produrre, nelle stesse condizioni di resistenza e nello stesso tempo, una uguale quantità di calore. La stessa cosa vale per la tensione efficace (Veff ). Si e poi calcolato che esiste una precisa relazione tra valori efficaci e valori massimi di corrente e tensione, come riportato nelle seguenti relazioni:

Se ora ricordiamo l’espressione per la potenza (media) che un generatore di c.c. può fornire (W =V. I), viene spontaneo dare una relazione analoga a patto di introdurre in luogo di V ed I i valori efficaci della tensione e della corrente che ora consideriamo:
W = Veff . Ieff
ebbene queste relazione è valida solo quando tensione e corrente sono in fase, cioè quando φ = 0. Nel caso più generale di tensione e corrente sfasate, la potenza (media) che un generatore di c.a. può erogare è sempre minore del valore ora visto. E’ stato dimostrato da Galileo Ferraris verso la fine dell’Ottocento che la formula che tiene conto delle sfasature tra correnti e tensioni deve essere scritta introducendo in essa un fattore compreso fra 0 ed 1 e strettamente legato al valore delle sfasature. Questo fattore (si chiama fattore di potenza), si scrive “cos φ” e si legge coseno di fi. Esso è appunto un numero che cambia al mutare di φ ; al massimo può assumere il valore 1 quando φ = 0, cioè quando tensione e corrente sono in fase (ed allora ritroviamo la formula precedentemente vista); assume invece il valore zero quando φ = 90° cioè quando tensione e corrente sono sfasate al massimo, infine assume tutti i valori che vanno da 0 ad 1 al variare di φ da 0° a 90°. La formula finale per la potenza (media) che un generatore può erogare si può quindi scrivere:
W = Veff . Ieff . cos φ .
Si osservi che quando cos φ = 0 risulta W = 0. In tal caso il generatore, anche se fornisce elevati valori efficaci di V e di I, non è in grado di compiere lavoro verso l’esterno; in questo caso i watt prodotti dal generatore non vengono che in minima parte forniti all’utilizzatore: in gran parte essi vengono riassorbiti dallo stesso generatore. In questo caso (cos φ = 0) la corrente si dice swattata, non e in grado cioè di fornire potenza. Nelle applicazioni industriali si tende evidentemente, con artifici tecnici e nei limiti del possibile, ad avere un sfasamento molto piccolo in modo da rendere cos φ il più possibile vicino ad uno.
GLI ALTERNATORI
Ho dato in figura 1 all’inizio del paragrafo precedente un disegno schematico di un alternatore, di una sorgente cioè di corrente alternata. E’ ora opportuno dare maggiori dettagli sia costruttivi che di funzionamento.
Un alternatore è una macchina sincrona, cioè una macchina funzionante a velocità rigorosamente costante che serve per trasformare l’energia meccanica (di rotazione di una sua parte) in energia elettrica (tra le macchine sincrone vi sono anche i motori che servono invece a trasformare l’energia elettrica in energia meccanica). Gli alternatori sono macchine che possono produrre potenze e tensioni elevatissime. Diciamo subito quindi che la spira in realtà non è una spira ma una bobina di N spire, per rendere l’effetto N volte più grande, e che il magnete non è un magnete permanente ma un elettromagnete, perché con gli elettromagneti si ottengono valori molto più elevati del campo B. Inoltre lo schema semplificato usato per gli alternatori è quello che vede i ruoli di campo magnetico e spira di figura 1, invertiti (fig. 12 e fig. 14). Per una serie di motivi costruttivi, si preferisce far ruotare il campo magnetico e mantenere la spira fissa (lo schema di figura 1 è generalmente usato, con opportune modifiche, per produrre corrente quasi continua con le dinamo). In figura 12 è mostrato uno schema ancora semplificato di alternatore: AA’BB’ sono un’unica spira fissa (vedi fig. 13) ed è quindi l’indotto; CD, che ruota intorno al suo asse passante per O, è invece l’elettromagnete che ruota ed è quindi l’induttore.
Figura 12: nel disegno si vede la bobina ferma ed un solo magnete che ruota. Anche qui in rotazione non si ha un solo elettromagnete, ma vari opportunamente sfasati (si dovrebbe intuire dalla fig. 14).
Figura 13: la unica bobina dell’indotto di un alternatore.

Figura 14: disegno di uno dei primi alternatori. Si noti la spira in quante bobine si dipana. Vi è nel disegno una parte su cui torneremo: un sistema che produce corrente continua montato sull’asse dell’alternatore (eccitatore). Capiremo oltre di cosa si tratta.
Figura 15: un moderno indotto (o statore).

Figura 16: l’induttore che ruota dentro l’indotto di fig. 15.
Figura 17: disegno di rotore e statore messi insieme. Sullo sfondo si vede la parte che alimenta il tutto mediante energia termica o meccanica. La turbina è fatta girare o da acqua in caduta o da vapore ad alta temperatura e pressione (è il caso di figura) prodotto da svariati tipi di centrali termiche.
In pratica, cioè, si preferisce avere, per un alternatore, un induttore ruotante ed un indotto fisso. E’ abbastanza semplice rendersi conto del perché si preferisca questo arrangiamento. Come chiaro da quanto fin qui detto, la tensione di uscita in un alternatore viene prelevata ai capi dell’indotto (della spira-bobina). Nel caso in cui l’indotto ruoti, per prelevare questa tensione sono necessari contatti striscianti mediante anelli e spazzole (fig. 18a).

(a) (b)
Figura 18: in (a) è riportato il sistema di anelli e spazzole che abbiamo già visto e che ci fornisce tensione e corrente alternata. In (b) il sistema permette di raddrizzare parzialmente la tensione e corrente alternata: ogni mezzo giro, anziché ogni giro, la corrente riprende il verso che aveva all’inizio. Sezionando ulteriormente quei semianelli ci si può avvicinare sempre più ad una corrente continua.
Nella fig. 18a ogni anello è saldato con un capo della spira ed è isolato dall’altro, oltre ché dall’asse di rotazione; man mano che la spira ruota la tensione che si genera ai suoi capi si ritrova sui due anelli; i due anelli, nella rotazione, strisciano su delle spazzole di carbone conduttrici che a loro volta sono collegate a dei fili conduttori ai capi dei quali si preleva la tensione di uscita. Un sistema come quello descritto è chiamato, come già detto, collettore. Ebbene questo sistema di prelievo della tensione funziona quando si ha a che fare con piccole potenze. Ma quando le potenze in gioco sono molto elevate, al collettore si pongono gravi problemi di isolamento non sempre risolvibili. Per questo si preferisce che l’indotto (da cui si preleva la tensione) sia fisso, in modo appunto da evitare contatti striscianti per il prelievo di alte tensioni e correnti. Indotto fisso prevede però che l’induttore sia in rotazione e poiché per induttore, come accennato, si preferisce un elettromagnete ad un magnete permanente, occorre inviare corrente all’induttore proprio per avere un elettromagnete. Quindi ancora contatti striscianti per inviare corrente al rotore ma con una differenza fondamentale: le tensioni e le correnti in gioco per eccitare il magnete sono di gran lunga più piccole di quelle che si hanno nel caso visto prima (prelievo) e in questo caso si può realizzare un buon isolamento.
Un altro vantaggio che si ha nell’uso dell’indotto fisso è che si possono ottenere più alte velocità di rotazione dell’induttore e quindi più alte tensioni (anche qui, senza entrare in dettagli, c’è alla base un problema di isolamento).
In definitiva un alternatore è realizzato con un indotto fisso ed un induttore in rotazione. All’uscita di questo alternatore si ha una tensione (e corrente, quando c’è un utilizzatore) alternata che è rappresentata dal grafico di figura 5; una tensione di questo tipo è anche chiamata monofase per distinguerla da tensioni a più fasi prodotte da altri particolari alternatori. In pratica gli alternatori monofase hanno scarsa applicazione, in loro luogo si preferiscono, per la loro maggiore efficienza, gli alternatori trifase. Lo schema di principio di un alternatore trifase ed il grafico delle tensioni in uscita sono riportati in figura 19.

Figura 19: in questo caso la spira e quindi la bobina non è una sola. Si hanno tre bobine i cui terminali, da cui prelevare tensione e corrente mediante anelli e spazzole, si hanno in aa’, bb’, cc’. Naturalmente, in uscita, si prelevano tre tensioni V1, V2, V3. Le bobine hanno gli assi sfasati tra loro di 1/3 di giro. Il grafico rappresenta le tre tensioni (o correnti) prelevate ai collettori (spazzole + anelli). Si dimostra che, in ogni istante, l’ordinata di una tensione è uguale alla somma, cambiata di segno, delle altre due.
Questo alternatore differisce da quello monofase perché, anziché avere un solo indotto, ne ha tre separati e distanziati di 120° l’uno dall’altro. Così si avranno anche tre tensioni in uscita (tre fasi) che risulteranno sfasate di 120° l’una rispetto all’altra. Le tensioni (o correnti) in uscita saranno prelevate da aa’, bb’ e cc’ di fig. 19-2 ed avranno un andamento come quello riportato in fig. 19-3. L’insieme di queste tre correnti (quando vi sono gli utilizzatori) costituisce quella che è chiamata corrente trifase. La ragione principale per cui la corrente trifase è preferita alla monofase è di natura economica. Infatti per portare all’esterno le correnti prodotte servirebbero normalmente 6 fili (allo stesso modo 6 sono i fili che dovrebbero portare all’esterno le correnti prodotte da tre alternatori monofase) due per ciascuna fase. Si è invece trovato che con appropriati co11egamenti degli utilizzatori (essenzialmente due: a stella e a triangolo, vedi figure 20 e 21) si possono
Figura 20: collegamento a stella di utilizzatori

Figura 21: collegamento a triangolo di utilizzatori
trasportare le tre correnti con solo tre fili. Ciò e reso possibile dal fatto che ad ogni istante l’intensità di una corrente è sempre uguale e contraria alla somma delle altre due intensità (vedi fig. 19-3: a = b + c), e quindi un filo che trasporti una fase serve contemporaneamente per il ritorno delle altre due.
C’è ancora un altro accorgimento che modifica l’alternatore, industrialmente in uso, rispetto a quello che abbiamo schematicamente illustrato ed è ancora relativo all’induttore rotante. Per produrre una corrente alla frequenza industriale di 50 Hz, se l’induttore fosse un unico magnete, occorrerebbe che l’induttore stesso ruotasse con la velocità di 50 giri al secondo che equivale a 3 000 giri al minuto (proprio per generare nell’indotto 50 variazioni alternate di flusso magnetico ogni secondo). Una tale velocità è difficilmente ottenibile, bisogna quindi cercare di ridurla senza modificare la frequenza della c.a. Ciò è reso possibile aumentando il numero dei magneti dell’induttore e disponendoli a raggiera con i poli nord alternati ai poli sud. Se i magneti sono, ad esempio, 24, si otterranno variazioni di flusso ogni ventiquattresimo di giro, cioè la velocità dell’induttore può ridursi ad 1/24 di 50 giri al secondo che equivale a circa 2 giri al secondo che equivale ancora a 125 giri al minuto, velocità quest’ultima molto più facilmente raggiungibile. La scelta del numero dei magneti viene comunque fatta in sede di progetto in relazione alle caratteristiche meccaniche delle turbine che azionano l’alternatore permettendo la rotazione dell’induttore. Per turbine veloci a vapore può andare bene un solo elettromagnete mentre per turbine idrauliche si possono avere da tre fino a trenta elettromagneti (da sei fino a sessanta poli).
REGOLAZIONE ED ACCOPPIAMENTO IN PARALLELO DI ALTERNATORI
Una delle caratteristiche (esterne) di un alternatore è quella relativa alla variazione della tensione che si preleva alla sua uscita, in funzione del carico utilizzatore collegato con essa (a parità di corrente eccitatrice per l’induttore). Quando infatti un alternatore funziona a vuoto (cioè senza utilizzatore o carico) la sua tensione di uscita si mantiene rigorosamente costante. Questa tensione subisce però delle variazioni, sempre a parità di corrente eccitatrice, al variare del carico che è collegato con essa.
E’ questo evidentemente un grosso inconveniente al quale si può far fronte agendo in modo tale da variare opportunamente il flusso dell’induttore così da sopperire alle suddette cadute di tensione. Per far ciò si può agire sulla corrente eccitatrice dell’induttore ricorrendo ai regolatori automatici di tensione che servono appunto a mantenere rigorosamente costante la tensione ai morsetti di uscita dell’alternatore al variare del carico (il più noto tra questi regolatori è il Brown-Boveri).
La caratteristica fondamentale degli alternatori è la loro possibilità di essere collegati in parallelo. In una centrale tutta la potenza a disposizione è generalmente divisa tra più alternatori collegati tra loro in parallelo allo scopo di utilizzare solo gli alternatori necessari a soddisfare la potenza richiesta all’esterno. Gli alternatori da collegare in parallelo dovranno essere stati costruiti per una stessa frequenza ed una stessa tensione di uscita. Il collegamento in parallelo è inoltre possibile anche per alternatori di centrali diverse distanti fra di loro (e questo fatto è particolarmente importante per garantire la fornitura di energia anche quando una centrale andasse fuori servizio per qualunque motivo). Uno schema di principio è mostrato in fig. 22. L’inserimento in parallelo di un
Figura 22
alternatore su una linea già alimentata da altri alternatori è molto delicato e richiede particolari accorgimenti. L’inserimento può infatti essere fatto solo quando l’alternatore da inserire ha stessi valori di tensione, di frequenza e abbia una tensione sfasata di 180° (sia cioè in opposizione di fase) rispetto alla rete. Il fatto che la tensione debba essere rigorosamente uguale (insieme alla frequenza) e la fase debba essere di φ =180° è spiegabile tenendo conto che si ha a che fare con due circuiti distinti: quello utilizzatore (gli alternatori in parallelo e la rete esterna) e quello interno degli alternatori. Consideriamo, per comprendere meglio, il parallelo di due alternatori monofase (fig. 23).
Figura 23
Nella figura la parte riquadrata circoscrive il circuito interno degli alternatori (riportato a tratto più marcato), mentre ciò che esce fuori dal riquadro porta alla rete utilizzatrice. Ebbene nel circuito interno degli alternatori non si avrà passaggio di una inutile e dannosa corrente di circolazione interna solo quando, istante per istante, tra i punti A e A’ e tra B e B’ vi sia identico valore di tensione. Questo fatto equivale a che i due alternatori forniscano stesso valore di tensione, stessa frequenza e siano in opposizione di fase (f = 180°). Quest’ultima condizione fa si che, nel circuito interno delle due macchine, essendo le tensioni uguali ed in opposizione, la loro risultante, istante per istante, sarà nulla. Se la tensione risultante, per il circuito interno, è nulla, risulta impossibile la circolazione di corrente nelle macchine stesse. Bisogna avvertire che se un alternatore è già collegato per erogare corrente, la tensione a vuoto (forza elettro-motrice: f.e.m.) del secondo alternatore da collocare dovrà essere in opposizione alla tensione di uscita sotto carico dell’alternatore collegato e non alla tensione a vuoto (f.e.m.) di quest’ultimo.
Oggi vi sono strumenti automatici che permettono l’allacciamento al momento più opportuno. Una volta effettuato il collegamento servono altre apparecchiature che siano in grado di ripartire il carico utilizzatore tra i vari alternatori in modo da evitare assolutamente che su un solo alternatore gravi un carico maggiore di quanto possa sopportare. Nel caso poi, per qualunque motivo, un alternatore tenda a rallentare rispetto all’altro, nel circuito di collegamento tra i due alternatori nascono particolari reazioni tali da fornire energia (a spese nell’altro) all’alternatore che ha rallentato, rispetto alla velocità che doveva inizialmente avere, e quindi riportarlo alla sua velocità.
Per capire ciò basta rifarsi a quanto dicevamo qualche riga più su. In condizioni di parallelo perfetto le f.e.m. V1 e V2 dei due alternatori debbono risultare identiche ed in opposizione di fase. Nel caso il secondo alternatore subisca un ritardo, la sua f.e.m. diventerà V’2 e la f.e.m. totale nel circuito interno non sarà più nulla. Quindi, sempre nel circuito interno, circolerà una corrente (corrente sincronizzante) dall’alternatore che funziona regolarmente a quello che ha ritardato. Si ha cioè un trasferimento di potenza da un alternatore all’altro tale da riportare quello che ha rallentato alla sua velocità. A questo punto le due f.e.m. tornano ad essere uguali e non si avrà più né passaggio di corrente sincronizzante né trasferimento di potenza da un alternatore all’altro.
Le varie regolazioni sugli alternatori si fanno operando su due grandezze: sulle turbine che possono far variare la velocità di rotazione dell’induttore (e quindi la frequenza e la fase della tensione di uscita) e sulla corrente eccitatrice dell’induttore per far variare l’intensità del campo magnetico induttore (e quindi il valore della tensione di uscita). Come si può ben capire ambedue queste regolazioni sono indispensabili per un buon funzionamento in parallelo degli alternatori.
TURBINE ED ACCOPPIAMENTO CON ALTERNATORI
Fino ad ora abbiamo parlato di un induttore che ruota ad alta velocità all’interno di un indotto, al fine di produrre tensioni e correnti alternate. Affinché ciò avvenga occorre avere a disposizione una opportuna sorgente di energia meccanica che provochi la rotazione dell’induttore intorno al proprio asse.
Supponiamo di avere dell’acqua in caduta (o un getto di vapore o di gas caldo) ad alta pressione e velocità, per trasformare queste fonti di energia in energia meccanica di rotazione occorre un adeguato trasduttore che è appunto la turbina. La turbina si afferma come superamento della ruota idraulica (adatta a piccole energie) per lo sfruttamento di grandi energie e potenze. Si tratta di avere a disposizione un meccanismo che sia in grado di sfruttare al massimo l’energia di getto d’acqua, di vapore o di gas che la fa ruotare sì da avere il massimo rendimento. Quando il fluido in oggetto arriva ad alta velocità e pressione alla turbina essa deve essere in grado di utilizzare completamente le due componenti principali di energia che il fluido ha a quel punto, quella dipendente dalla velocità del getto (energia cinetica) e quella dipendente dalla pressione del getto stesso. Il fluido deve cioè lasciare la turbina a velocità quasi nulla e a pressione circa uguale a quella atmosferica. Quanto detto rende ragione della classificazione delle turbine, rispetto al funzionamento dinamico, in due grandi classi; turbine ad azione, impiegate per sfruttare l’energia cinetica del fluido, nelle quali la pressione del fluido stesso ha il medesimo valore sia a monte che a valle del sistema girante; turbine a reazione, per prelevare tanto l’energia cinetica che l’energia di pressione.
I rendimenti delle turbine dipendono generalmente da svariati fattori tra i quali non ultimo c’è il tipo di fluido e di processo che le fa muovere. In ogni caso i rendimenti maggiori si hanno nelle turbine idrauliche dove comunque non si supera il 92%.
Ritornando alla rotazione dell’induttore in un alternatore, il suo asse è collegato all’asse della turbina. Quest’ultima trasforma l’energia dovuta alla pressione ed alla velocità del fluido che la fa muovere in energia meccanica di rotazione dell’asse; l’alternatore poi, che è accoppiato ad essa, trasforma questa energia meccanica in energia elettrica.
Le turbine sono anche dotate di organi regolatori del flusso del fluido in modo da poterle rallentare e fermare nel caso in cui l’alternatore ad esse accoppiato vada fuori uso o debba andare fuori servizio. Le operazioni devono comunque essere eseguite con relativa lentezza per evitare disastrosi colpi d’ariete nelle tubature. Concludo il paragrafo mostrando alcune turbine nelle figure che seguono. Intanto inizio con un minimo di classificazione. Le turbine possono essere:
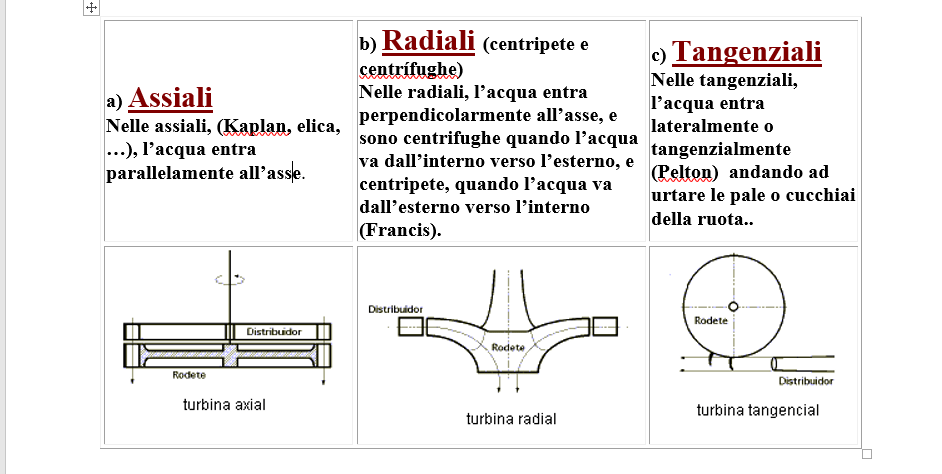
Iniziamo con il vedere un esempio di turbina assiale, la Kaplan. Questo tipo di turbina trova impiego nelle centrali ad acqua fluente con salto generalmente piccolo (da pochi metri a una cinquantina) perché si sfrutta generalmente la grossa portata del fiume, che può giungere fino a centinaia di m3 al secondo.
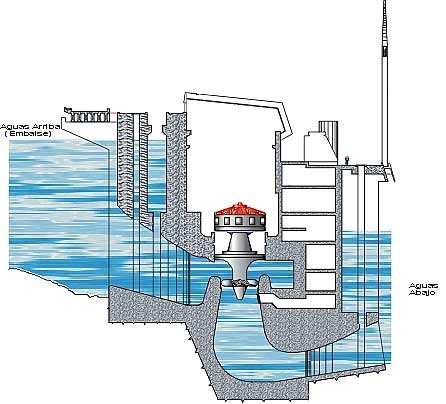
Figura 24: Turbina Kaplan ad asse verticale. In genere l’uso di tale turbina è in impianti idraulici in cui vi è un piccolo dislivello ma una grande massa d’acqua. La figura rende bene la situazione: nel passaggio dal bacino più elevato a quello più in basso si aziona la turbina che ha la forma mostrata in figura 25.

Figura 25
Altro esempio di utilizzo di Kaplan è in un fiume con le caratteristiche suddette:

Figura 26
Le tre finestre di fig. 26 che sono in via di montaggio avranno ciascuna applicata una Kaplan (fig.27), come mostrato in fig. 28:
Figura 27

Figura 28
Schematicamente la Kaplan funziona come mostrato in figura 29.
Figura 29
Vediamo come funziona una turbina radiale, la Francis, a partire dalla figura 30 dove sono rappresentate vari contenitori di turbine Francis in una centrale idroelettrica.
Figura 30
Entrato il fluido dentro tali contenitori trova le vere e proprie turbine mostrate in figura 31. Si tratta di una turbina a flusso centripeto, nella quale cioè il flusso è diretto verso
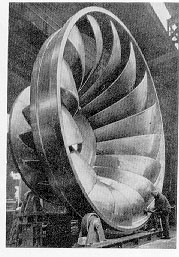
Figura 31
l’interno. La cosiddetta turbina a reazione è (o almeno è stata) la turbina idraulica più usata per salti d’acqua da 10 a 100 m. Entrando l’acqua. Schematicamente il suo funzionamento è illustrato in figura 32.
Figura 31
Vediamo ora la turbina tangenziale, Pelton. Tale turbina è progettata per impianti che possono disporre di dislivelli da 100 a 1000 m. Essa raccoglie con dei giganteschi cucchiai l’acqua in caduta in condotte forzate. Quest’acqua confluisce in degli ugelli che immettono alle turbine Pelton (fig. 33)
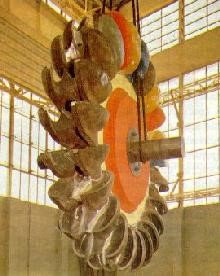
Figura 33
Ed il suo modo d’applicazione è schematizzato in figura 34.
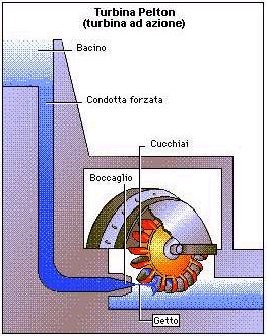
Figura 34
Oggi le turbine si sono fatte molto più sofisticate, fino a raccogliere tutta l’energia del fluido che le aziona. Le moderne centrali, le termoelettriche o quelle a gas, hanno in funzione turbine prima di alta pressione e poi di bassa pressione (che servono ad utilizzare il fluido che ha già azionato le prime ed ha perso molta della sua energia cinetica). Inoltre la turbina, con un gas o un vapore non può più essere costituita da una semplice ruota con palette. Essa diventa veramente qualcosa di molto complesso tecnologicamente. Ne mostro una, aperta in un momento destinato alla manutenzione, in figura 35.
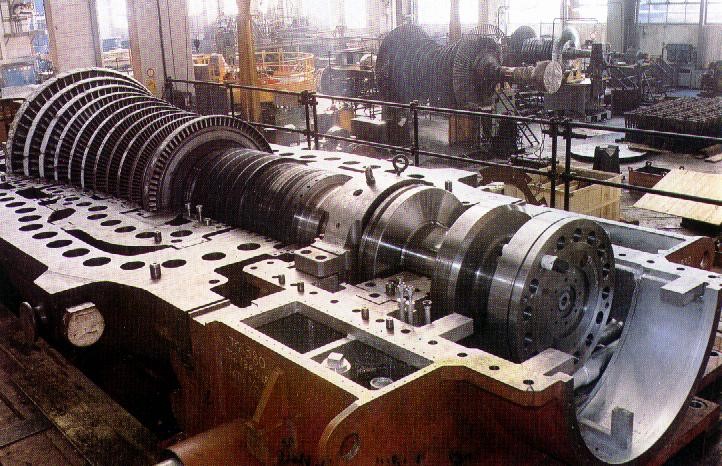
Figura 35
ECCITATORI E DINAMO
Abbiamo già parlato di eccitatori per gli alternatori. Occorre ora dire qualcosa di più sul loro funzionamento.
Sappiamo già che un induttore in un alternatore è un elettromagnete ed un elettromagnete è costituito da una barra di ferro dolce o di acciaio (nucleo) intorno a cui è avvolto a matassa un filo conduttore. Appena nel conduttore viene fatta circolare corrente continua la sbarra si magnetizza diventando appunto un elettromagnete. Nel caso quindi del nostro induttore occorre disporre di una corrente continua che circoli nel filo avvolto intorno al nucleo e lo faccia diventare un elettromagnete. Allo scopo occorre quindi un generatore di corrente continua che alimenti con continuità l’induttore. Questo generatore è chiamato eccitatore. Esso può essere montato o sullo stesso asse motore dell’alternatore o separato da esso. In ogni caso il dispositivo più usato fino ad alcuni anni fa ed ancora oggi molto in uso è la dinamo che è appunto un generatore di corrente continua.
Il funzionamento di principio di una dinamo non si discosta molto da quello di un alternatore e per comprenderlo ci possiamo rifare direttamente alla fig. 1 (spira ruotante in un campo magnetico) ed alla fig. 18-a (sistema collettore formato da contatti striscianti tra anelli e spazzole). Abbiamo già detto che nel caso di un alternatore per correnti e tensioni elevate non era consigliabile avere l’indotto in movimento poiché il prelievo della tensione fatto attraverso contatti striscianti poneva gravi e non risolubili problemi di isolamento. La figura 1 insieme alla figura 18-a servivano quindi solo ad illustrare il principio di funzionamento di un alternatore che nella pratica è invece realizzato come in figura 19-2 (essenzialmente con l’indotto fisso e l’induttore in moto). Nel caso invece di una dinamo, poiché tensioni e correnti in gioco sono più piccole, è possibile usare contatti striscianti per prelevare la tensione di uscita e quindi è possibile avere l’indotto in moto proprio come nella figura 1. Ma uno strumento come quello visto forniva comunque tensione alternata. Per renderla continua o quasi occorre modificare il sistema di collettore, visto in figura 18-a, come in figura 18-b (commutatore). Ridisegno la figura 18-b più in dettaglio per spiegare il funzionamento del commutatore.
(a) (b) (c)
Figura 36
Per capire come funziona questo sistema formato da due semianelli collegati alle estremità della spira (ed isolati fra loro) e due spazzole striscianti serviamoci delle figure 36-b e 36-c, ottenute guardando il sistema lungo l’asse della spira e dei semianelli in due istanti successivi, quando nel suo moto rotatorio la spira dà luogo all’inversione dei contatti dei due semianelli con le due spazzole. Nella spira circola sempre una corrente indotta che viene trasferita all’esterno attraverso i due contatti A e B delle spazzole. Nel caso di figura 36-b la corrente va dalla spazzola A al semianello 1 e quindi, tramite la spira, dal semianello 2 alla spazzola B. In definitiva la corrente prodotta
dalla spira ha il verso che va da A a B. Nel caso di figura 36-c, quando la spira ha superato la posizione di tensione nulla (spira perpendicolare alle linee di forza), le spazzole si sono scambiati i semianelli e contemporaneamente la corrente nella spira circola in verso opposto ; ciò fa sì che la corrente vada dalla spazzola A al semianello 2 e quindi, tramite la spira, dal semianello 1 alla spazzola B. In definitiva, anche qui, la corrente prodotta dalla spira circola da A verso B. La corrente complessiva prodotta da un giro completo della spira sarà allora, unidirezionale ed anche se non proprio
continua avrà un andamento come quello riportato in figura 37 (questo collettore taglia la componente negativa della corrente alternata facendola diventare corrente pulsante).

Figura 37: Loop = Spira; Field = Campo; EMF = Forza elettromotrice.
Anche qui però con opportuni accorgimenti costruttivi è possibile rendere praticamente continua la tensione e corrente di uscita. Si tratta di avere, anziché una sola spira,
tanti gruppi di spire avvolte intorno ad un nucleo di ferro dolce (anello di Pacinotti) che funzionano da indotto ed un commutatore consistente in tanti settori di rame quanti sono
i gruppi di spire disposti sopra un cilindro ed isolati tra loro (fig. 38, fig. 39 e fig. 40). In
Figura 38: In questo caso si dispone di due spire ruotanti. I semianelli sono diventati quattro. Le tensioni si sovrappongono in modo da dare per risultante ciò che è mostrato in figura 39.
Figura 39
Figura 40: Le spire ruotanti sono ora tre (a). I semianelli sono sei (a). La tensione risultante è mostrata in (c).

Figura 41: come si presenta in genere un disegno schematico di una dinamo.
questo modo la corrente di uscita risulta uguale alla somma di tutte le correnti indotte originate in ciascun gruppo di spire ed si avvicina sempre più ad una corrente continua al crescere del numero degli avvolgimenti, come mostrato in figura 40-c. La dinamo è inoltre una macchina ad elevato rendimento che, in pratica, in una buona dinamo può arrivare al 92%.
E’ quindi una dinamo che viene usata da eccitatore per fornire tensione (continua) all’induttore di un alternatore. Questa dinamo può essere montata sullo stesso asse dell’alternatore in modo che la rotazione di quest’asse origini contemporaneamente la rotazione dell’indotto della dinamo e dell’induttore dell’alternatore.
Altre volte, per svariate ragioni, la dinamo può essere separata dall’alternatore. Oggi poi, per ragioni di maggiore semplicità costruttiva e maggiore facilità di regolazione,
si tendono ad usare altre macchine separate dall’alternatore (raddrizzatori statici, raddrizzatori a secco, commutatori a vapori di mercurio, …).
TRASFORMATORI ED EFFETTO JOULE
Quando abbiamo introdotto la c.a. abbiamo detto che uno dei suoi vantaggi rispetto alla c.c. era la possibilità di trasformazione di una tale tensione (e corrente), fatto, quest’ultimo, fondamentale per le esigenze di trasporto della corrente medesima.
I generatori di c.c. infatti (come ad es. la dinamo) sono in grado di produrre solo alte correnti e tensioni non troppo elevate (e questo a causa delle difficoltà di isolamento a cui si è più volte accennato, che si hanno per prelevare la tensione, mediante contatti striscianti, dall’indotto in movimento). Se si dovesse trasportare corrente continua occorrerebbe farlo in condizioni di bassa tensione e notevole intensità di corrente.
Ma, a questo punto, occorre ricordare che il passaggio di una corrente
in un circuito elettrico provoca il riscaldamento di quest’ultimo. Il fatto che un conduttore percorso da corrente si riscaldi è noto come Effetto Joule.
Abbiamo già visto che la potenza elettrica la possiamo esprimere come prodotto della tensione V per la corrente I:
(1) W = V . I
Ma, d’altra parte, la potenza è il lavoro fatto nell’unità di tempo:
(2) W = L / t
Di conseguenza il lavoro fatto dalle forze elettriche si ottiene sostituendo la (2) nella (1):
(3) L / t = V . I da cui L = V . I . t
Sappiamo poi dal 1° principio della, termodinamica che, quando non c’è variazione dell’energia interna di un sistema, tutto il lavoro meccanico (od elettrico) si trasforma in calore, secondo la relazione; .
(4) L = J . Q
dove Q è il calore prodotto dal lavoro L e J è una costante (J = 4186 joule/Kcal).
L’espressione ora vista può essere sostituita al 1° membro della seconda delle (3), ottenendo:
(5) JQ = V . I . t da cui Q = (1/J) . V . I . t
dove Q è la quantità di calore prodotto in un circuito al passaggio, per un tempo t, di una corrente di tensione V ed intensità I.
Ricordando ora che tensione e la corrente sono legate tra loro dalla legge di Ohm:
(6) V = I . R
(con R = resistenza del circuito) si può sostituire questa relazione nella seconda delle (5)
ottenendo:
Q = (1/J) . I2 . R . t
Poiché poi 1 / J = 0,00024 Kcal/joule, l’ espressione finale che otteniamo è:
(7) Q = 0,00024 . I2 . R . t Kca1/joule
(questa relazione è certamente valida, per c.c. Per la sua validità in c.a. basta intendere V ed I come i valori efficaci delle tensioni e correnti alternate in oggetto). E questa relazione che esprime la legge di Joule dice che: la quantità di calore sviluppata da una corrente elettrica in un circuito è proporzionale al quadrato dell’intensità di corrente, alla resistenza del circuito ed al tempo in cui questa corrente circola.
Per quel che ci interessa, è importante osservare la dipendenza dal quadrato della corrente in contemporanea con la dipendenza dalla resistenza. Infatti per rendere il più piccolo possibile Q occorre rimpicciolire sia I2 che R (visto che sul tempo necessario ad una corrente per trasferirsi da un punto ad un altro non possiamo intervenire). Ma noi sappiamo che le dinamo producono alte correnti (e basse tensioni) e quindi il nostro
campo di intervento si riduce ad R. Da un punto di vista tecnico si potrebbe diminuire di molto la resistenza della linea ma, per far questo, occorrerebbe usare cavi di grande sezione. Per ragioni economiche questa eventualità viene esclusa.
Con la corrente continua quindi si avrebbero grosse perdite per effetto Joule nel trasporto a distanza. Con le correnti alternate le cose vanno diversamente. Infatti un alternatore può produrre alte tensioni che, essendo alternate, possono essere trasformate ulteriormente in tensioni (anche moltissimo) più alte (come vedremo subito); nel trasformare una tensione in una più alta si ha, a parità di potenza, la conseguenza dell’abbassamento (anche notevole) della corrente. Vediamo perché. La potenza in c.a. è data da:
W = Veff . Ieff . cos φ .
Poiché in una stessa corrente il cos f si mantiene lo stesso non ci interessa; rimane allora da occuparci degli altri termini della relazione. Se W rimane costante ed aumentiamo Veff , proprio perché W rimane costante, si ha come conseguenza una diminuzione proporzionale di Ieff. Posto cos φ =1, se W = 10, Veff = 5 e Ieff = 2 si ha:
10 = 5 . 2
se raddoppiamo Veff , come conseguenza si dimezzerà Ieff
10 = 10 . 1
e così via:
10 = 100 . 1/10 = 1.000 . 1/100 = 10 000 . 1/1000
Quindi il poter trasformare una tensione è un fatto di notevole importanza che tra l’altro si realizza con macchine ad elevatissimo rendimento, i trasformatori, con nessun organo in movimento e concettualmente molto semplici.
I1 trasformatore (in prima approssimazione) consiste di due avvolgimenti elettrici
elettricamente separati ma concatenati magneticamente sullo stesso nucleo di ferro (fig. 42). Uno dei due avvolgimenti è il circuito primario, l’altro è il secondario.
(a) (b) (c)
Figura 42
Quando al primario inviamo una tensione alternata, delle linee magnetiche di forza si creano nello spazio circostante, linee che sono catturate dal ferro e che quindi in grandissima parte passano attraverso di esso. Queste linee di forza vanno a concatenarsi con l’avvolgimento del secondario. A questo punto viene fuori, il grande vantaggio della c.a. rispetto alla c.c. Proprio perché la corrente alternata di cui noi disponiamo al
primario va alternativamente da A a B e quindi da B ad A (cambiando verso 50 volte al secondo, d’accordo con i 50 Hz di frequenza della rete elettrica), le linee di forza che si originano al passaggio della corrente cambieranno alternativamente verso con 1a stessa frequenza della corrente. Quindi il flusso delle linee di forza concatenato con il secondario varierà allo stesso modo raggiungendo valori minimi e massimi 50 volte al secondo.
Abbiamo già visto che quando c’è variazione di flusso concatenato si genera nel circuito, non alimentato ma sottoposto a questa variazione una corrente indotta. Ebbene il passaggio di una corrente alternata nel primario origina una corrente alternata della stessa frequenza nel secondario.
Vediamo ora quali sono i valori delle correnti e delle tensioni.
Essi dipendono dal numero delle spire N1 del primario e da quelle N2 del secondario. Si dimostra che vale la relazione:
V2 : V1 = N2 : N1
cioè:
(8) V2 / V1 = N2 / N1 da cui V2 = V1 . (N2 / N1)
Questa relazione vuol dire che il trasformatore eleva o riduce la tensione a seconda che il rapporto N2 / N1 sia maggiore o minore di 1. Se volessimo elevare la tensione dovremmo avere un basso numero di spire al primario ed un alto numero di spire al secondario; viceversa nel caso si volesse ridurre lo tensione.
Supponiamo di avere una tensione al primario di 1000 V e di volerla portare a 10000 V. Basta far si che il rapporto N2 / N1 (rapporto di trasformazione) sia uguale a 10 e quindi si potranno avere, ad esempio, 100 spire al primario (N1 = 100) e 1000 spire al secondario (N2 = 1000) cosicché N2 / N1 = 1.000/100 = 10. Per ridurre la tensione da 10000 V a 1000 V basta operare allo stesso modo e far si che N2 / N1 = 1/10. Si avranno quindi, ad esempio, 1000 spire al primario (N1 = 1000) e cento spire al secondario (N2 = 100), di modo che N2 / N1 = 1/10.
Nel caso in cui si disponga di un carico collegato al secondario allora il trasformatore non trasforma più solo la tensione ma anche la corrente, diventando un trasformatore di potenza. Poiché, abbiamo già detto, il trasformatore è una macchina
ad altissimo rendimento (può superare anche il 99%), si possono considerare uguali le potenze di entrata e di uscita (è sottinteso che le tensioni e le correnti sono quelle
efficaci):
V1 . I1. cos φ1 = V2 . I2 . cos φ2
In normali condizioni cos φ1 è circa uguale a cos φ2 per cui, con buona approssimazione, si può scrivere:
V1 . I1 = V2 . I2
cioè:
V2 / V1 = I2 / I1
e, ricordando la prima delle (8), si ha:
I1 / I2 = N1 / N2 da cui I2 = I1 . (N2 / N1)
Si vede subito allora che, mentre le tensioni erano direttamente proporzionali ai numeri di spire del primario e del secondario, le correnti risultano inversamente proporzionali
allo stesso numero di spire; quindi mentre la macchina eleva tensione abbassa corrente a viceversa (vedi fig. 42-a e 42-c).
Si tenga poi conto che la differenza fra le intensità delle correnti del primario e del secondario dimensiona anche le sezioni dei fili conduttori nei due circuiti. Infatti là dove le correnti sono più elevate occorre utilizzare cavi di sezioni maggiori (resistenze minori).
Un importante problema che si presenta utilizzando i trasformatori, soprattutto se di elevata potenza è quello del loro raffreddamento. Si pensi che un trasformatore con la potenza di 5000 KW con un rendimento del 97% dà una perdita di 150 KW che vanno a scaldare il trasformatore come un forno di quella potenza.
Per raffreddare i trasformatori si usano due metodi:
1) raffreddamento ad aria: quando i trasformatori sono di piccola potenza basta lo scambio di calore con 1’ambiente esterno, per raffreddare il trasformatore;
2) raffreddamento ad olio: per trasformatori di elevata potenza. Il trasformatore è posto in un contenitore metallico pieno di olio minerale. L’olio ha il duplice scopo di isolare le varie parti del trasformatore e di raffreddarlo con i suoi moti convettivi. Le pareti dei recipienti sono poi munite di radiatori per facilitare lo scambio con l’aria esterna. Nel caso in cui si usi l’olio per raffreddare un trasformatore occorre porre in atto due importanti precauzioni. La prima è che il recipiente deve essere sempre pieno d’olio (ed allo scopo si usa un particolare recipiente esterno – il conservatore d’olio – che serve appunto a mantenere costante il livello dell’olio). La seconda è relativa alla formazione nel trasformatore di sovracorrenti che sviluppino dall’olio dei gas che possono originare delle esplosioni (ed allo scopo si usano delle apparecchiature automatiche che servono a distaccare il trasformatore dalla linea in caso di produzione di sovracorrenti).
La figura 42 è relativa ad un trasformatore statico monofase. E’ utile accennare al fatto che, a partire dallo stesso principio, vi sono trasformatori trifasi: ogni fase viene trasformata come ora visto. La figura 43-a esemplifica il principio della trasformazione
Figura 43
fase per fase (in b c’è la rappresentazione schematica). Naturalmente un sistema del genere sarebbe inutilmente farragginoso oltre ché costoso. La figura 44-a mostra un trasformatore statico trifase (in b c’è la rappresentazione schematica) con collegamento
Figura 44
a stella di primario e secondario (si possono anche fare altri collegamenti). La figura 45 mostra lo schema di realizzazione pratica di questo trasformatore trifase: si noti che il

Figura 45
primario è avvolto sotto al secondario (naturalmente i cavi sono ben isolati). Infine la figura 46 mostra un grande trasformatore trifase in funzione in una centrale elettrica
Figura 46
(il cilindro orizzontale in alto è il conservatore d’olio).
LINEE DI TRASMISSIONE DELL’ENERGIA ELETTRICA (INTERCONNESSIONE E RISERVA)
Abbiamo a questo punto in mano tutti gli elementi per seguire l’energia dal momento in cui diventa elettrica fino al momento in cui viene usata nell’industria, negli usi civili, nei trasporti. Non dobbiamo far altro che ricapitolare brevemente introducendo alcune informazioni aggiuntive.
A monte di ogni processo di produzione e trasporto di energia elettrica vi è la centrale. Di qualunque tipo sia la centrale essa abbisogna di una fonte primaria, di energia che può essere acqua in caduta (centrali idroelettriche), vapore natura1e o da rocce calde e secche con immissione d’acqua (centrali geotermoelettriche), vapore originato bruciando combustibili fossili (centrali termoelettriche), vapore originato da energia nucleare (centrali nucleari), gas ad alta temperatura e pressione originato dalla combustione di nafta o metano (centrali turbogas).
Ogni centrale ha lo scopo di trasformare energia da un qualunque tipo iniziale, in energia meccanica di rotazione della turbina (nel caso di centrali idroelettriche si trasforma energia gravitazionale di caduta di una massa di acqua; nel caso delle centrali termoelettriche o turbogas o geotermoelettriche o nucleari o solari si trasforma energia termica). Quanto fin qui riassunto è schematizzato nella figura 47.
Figura 47
La rotazione della turbina è trasmessa all’induttore dell’alternatore (ed alla relativa dinamo eccitatrice) che ha lo scopo di trasformare energia meccanica di rotazione in energia elettrica (ad alta corrente e bassa tensione). Poiché poi per il trasporto è conveniente avere tensione molto alta (con conseguente corrente bassa), collegato all’alternatore vi è il trasformatore che ha lo scopo di trasformare la tensione a valori molto più alti di quelli di produzione (fino a 380 000 volt). A questo punto c’è la linea ad alta tensione (l’elettrodotto) che collega la centrale con i luoghi di consumo. La tensione immessa in queste linee è per gli elettrodotti principali di 380 000 volt (380 KV) e di 220 000 V (220 KV). Per gli elettrodotti secondari questa tensione scende a vari livelli. (In alcuni Paesi come gli U.S.A. e 1a Russia sono in via di sperimentazione linee di trasmissione a c. c. della. tensione di 800 KV). Si tenga conto che le perdite su una linea si aggirano intorno al 20% (se in buono stato di conservazione e di manutenzione).
Arrivati al luogo di utilizzo la tensione viene ridotta a valori più bassi. Se il centro di utilizzazione è di piccola estensione (raggio di circa 200 m) si ha una sola cabina di trasformazione che porta la tensione ai normali 220 V (e 380 V) d’uso. Se il centro di utilizzazione è invece di grande estensione si hanno prima delle sottostazioni che trasformano la tensione intorno agli 11 000 V; quindi, da queste sottostazioni partono linee che vanno ad alimentare svariate cabine per l’ulteriore trasformazione ai valori normali d’uso della tensione (220 V o 380 V). Nella figura 48 è riportato uno schema riassuntivo di quanto detto (con i relativi rendimenti η).
Figura 48
Naturalmente il ciclo ora illustrato ha bisogno di tutta una serie di controlli, soprattutto al fine di mantenere equilibrio tra l’energia assorbita degli utilizzatori e l’energia generata.
Un problema, fondamentale del ciclo ora descritto è quello del rendimento complessivo e quindi quello delle perdite.
Il rendimento globale di un impianto è definito come il rapporto fra tutta la potenza utilizzata (Wu) e tutta la potenza erogata (W). Si ha quindi:
η = Wu/W
A fini costruttivi serve però dare i rendimenti dei singoli componenti il ciclo. In ogni caso se W è la potenza erogata ed η1, η2, η3 … sono i rendimenti dei singoli apparati, la potenza utilizzata sarà data dalla quantità:
Wu = W . (η1 . η2 . η3 . … )
e ciò vuol dire che il rendimento complessivo di un impianto è dato dal prodotto dei rendimenti dei singoli componenti l’impianto. Nel caso visto in figura 48 si ha (riferendoci al caso di utilizzazione come forza motrice) nell’ipotesi di W iniziale uguale a 1 000 W:
Wu = 1 000 . (0,9 • 0,98 • 0,8 . 0,98 • 0,8) =1 000 . 0,55 = 550 W
E questo esempio è abbastanza generalizzabile: si perde circa la metà dell’energia a partire dalla fonte primaria fino ad arrivare all’utilizzazione con l’intermediazione elettrica.
Prima di concludere con questo paragrafo ancora qualche parola sull’interconnessione e la riserva.
Abbiamo già detto che vari impianti per la produzione energetica possono venire collegati in parallelo. A questo collegamento in parallelo esteso a tutti i centri di produzione nazionale (e non solo) si dà il nome di interconnessione. Naturalmente una volta interconnesse più stazioni di produzione si tratterà di distribuire la potenza disponibile ai vari centri di consumo.
L’interconnessione presenta svariati vantaggi tra i quali la connessione dei carichi delle punte, l’integrazione reciproca delle centrali di produzione, la riduzione della quantità del macchinario di riserva, l’aumento delle potenze unitarie dei gruppi generatori.
Tra i vantaggi ora elencati dell’interconnessione merita attenzione quello relativo alla riserva.
La riserva di potenza nel passato veniva intesa come un surplus di macchinari che in centrale facesse fronte all’andata fuori servizio di quelli in uso.
E’ appunto il concetto prevalso negli ultimi anni di interconnessione che ha fatto superare quello precedente di riserva. Infatti se una centrale dovesse andare fuori servizio, non servono macchinari che sostituiscano quelli guasti o in manutenzione, poiché l’intera rete supplisce alla potenza che viene a mancare. Purché l’interconnessione sia completa (non è il caso italiano dove, ad esempio, un solo elettrodotto unisce il nord al sud: se per jattura andasse fuori servizio i black-out sarebbero la norma [queste cose le scrivevo nei primi anni ’80. Oggi dopo la più grande idiozia energetica fatta dai nostri governi, a cui se ne sommano altre, la privatizzazione dell’energia elettrica e la separazione tra produzione e trasporto, e dopo il 18 settembre 2003, debbo dire che ero facile profeta n.d.r.]).
La riserva, definita come maggiore potenza generatrice disponibile in rete, può comunque essere di due tipi: riserva come margine di potenza di gruppi già in servizio (riserva rotante) e riserva come gruppi pronti ad entrare in servizio in caso di manutenzione programmata di uno o più gruppi (riserva fredda). L’entità della riserva occorrente ad un Paese è determinata da procedimenti molto aleatori che spesso sono usati come strumenti di pressione (in Italia era al 1980 del 24% mentre in tutti gli altri Paesi dell’Europa oscilla intorno al 16%).
MOTORI ELETTRICI
Abbiano già visto come funzionano gli alternatori e le dinamo che con lo stesso principio trasformano energia meccanica (di rotazione) in energia elettrica. Abbiamo accennato anche ad un motore quando abbiamo parlato del lancio di un gruppo in una centrale turbogas. Poiché quando ci siamo occupati di linee di trasmissione ed in particolare di utilizzazione, abbiamo avuto modo di parlare di energia elettrica per produrre forza motrice è il caso ora di occuparci brevemente dei motori elettrici.
Il motore elettrico è una macchina che trasforma energia elettrica in energia meccanica e permette quindi l’uso (versatile) dell’energia elettrica in innumerevoli situazioni. Oltre ai grossi motori usati nell’ industria per presse, torni, trapani, compressori, fresatrici,… si pensi agli innumerevoli usi domestici del motore elettrico: frigoriferi, lavatrici, lavastoviglie, asciugacapelli, ventilatori, aspirapolvere, ascensori, …
I motori elettrici si dividono in due grosse categorie: quelli a corrente continua e quelli a corrente alternata.
I motori a corrente alternata si dividono a loro volta in due tipi: quelli sincroni e quelli asincroni.
Cominciamo con il vedere il principio di funzionamento dei motori a c.c.
Un motore elettrico a c.c. è, dal punto di vista costruttivo, la stessa cosa della dinamo (vedi) poiché questo apparato, come del resto vedremo per l’alternatore, è reversibile, potendo indifferentemente trasformare energia meccanica in elettrica o viceversa. L’unica differenza consiste, evidentemente, nel fatto che ora occorre alimentare la macchina con c.c. e ottenere in uscita energia meccanica di rotazione dell’asse (e quest’ultimo ruoterà in verso contrario a quello che la macchina avrebbe se fosse utilizzata come dinamo).
I motori in c.c. sono insostituibili nella trazione ferroviaria e tramvaria perché la loro velocità è regolabile entro ampi margini e questa regolazione si ottiene con facilità. E’ questo dunque un caso in cui occorre trasformare (termine improprio) la c.a. in c.c. Tra l’altro questi motori hanno la caratteristica di essere autoregolatori, sono in grado cioè di assorbire dalla rete che li alimenta una potenza elettrica proporzionale alla potenza meccanica che si vuole ottenere da essi. Un’altra loro caratteristica importante è la stabilità; in essi infatti si realizza sempre un equilibrio dinamico tra la velocità di funzionamento ed il carico: al crescere del carico diminuisce la velocità di funzionamento e viceversa (quando si devono ottenere sforzi rilevanti dal motore esso deve poter funzionare a bassa velocità: si pensi ad un treno in salita; viceversa si richiede alta velocità per sforzi meno rilevanti: treno che corre su di un rettilineo). L’eccitazione di questi motori può aver luogo in serie od in parallelo. Nel caso di eccitazione in parallelo essi hanno velocità poco variabile col carico ed in ultima analisi sono usati solo là dove occorre una velocità costante (macchine utensili). La costanza della velocità si può ottenere applicando alla macchina carichi molto ridotti. Se poi 1’eccitazione è in serie siamo nel caso che abbiamo illustrato a proposito della trazione ferroviaria: la velocità diminuisce all’aumentare del carico ed i carichi sopportabili sono molto variabili (si badi che se il carico tende ad annullarsi la velocità aumenta a valori che arrivano a causare la rottura della macchina). La variazione della velocità di un motore di questo tipo si può ottenere agendo o sulla corrente di eccitazione o sul numero delle spire dell’induttore.
Come accennato, i motori elettrici a c.a. possono essere sincroni o asincroni. Il motore elettrico a c.a. sincrono è, anche qui, una macchina che già conosciamo usata in modo reversibile (vedi). Questa macchina richiede c.a. per l’alimentazione (e c.c. per l’eccitazione) e fornisce lavoro meccanico di rotazione del suo asse. Abbiamo già visto l’accoppiamento in parallelo di due alternatori (vedi): ebbene se togliamo ad uno degli alternatori in parallelo l’alimentazione da parte della turbina lasciandolo collegato alla rete, quel meccanismo di corrente sincronizzante già visto farà sì che questo alternatore vada ad assorbire energia elettrica dalla rete per fornire energia meccanica di rotazione al suo asse. La velocità quindi di questo motore risulta rigorosamente costante ed uguale a quella che avrebbe se funzionasse come alternatore, essendo direttamente proporzionale alla frequenza della rete. Il motore sincrono non può avviarsi con semplice collegamento alla rete ma ha bisogno di un motore di lancio per fargli raggiungere il sincronismo; a questo punto, mediante un’operazione di parallelo, analoga a quella vista per gli alternatori, si può collegare alla rete. Esso può quindi essere utilizzato solo tutte quelle volte in cui ci sia bisogno di velocità costanti, avendo a disposizione utilizzatori con poca variabilità, con un uso continuativo (per la difficoltà, appunto di avviare o fermare un motore di questo tipo).
In ogni caso l’uso più importante dei motori sincroni in alternata è quello di rifasatori di linea, per migliorare cioè il fattore di potenza cos f (agendo sulla fase f della tensione di rete). Infatti se si varia l’eccitazione di questo motore, a parità di carico, si ha la possibilità di variare la fase della corrente che il motore assorbe. In questo modo è possibile quindi avere correnti e tensioni con un angolo di fase sempre molto piccolo in modo che risulti circa uguale ad 1 il fattore di potenza cos f (si ricordi che la potenza elettrica è data da W = Veff . Ieff . cos f ). Per questa sua proprietà il motore sincrono in alternata è spesso inserito come rifasatore in linee di trasmissione in cui siano presenti carichi che tendano a sfasare la corrente. Uno schema di collegamento alla rete di un sincrono rifasatore è mostrato in figura 49.
Figura 49
L’ ultimo tipo di motore che dobbiamo considerare è il motore elettrico a c.a. asincrono. Esso è molto semplice, molto robusto e molto diffuso per gli usi più svariati nell’industria. Un motore asincrono è essenzialmente un alternatore trifase con induttore fatto in modo diverso. In questo caso 1’induttore è costituito da un circuito chiuso di rame a forma di gabbia cilindrica (vedi figura 50); questa gabbia è inserita in un cilindro di ferro a lamine ed il tutto è girevole attorno ad un asse.
Figura 50
Supponiamo ora di collegare un motore asincrono così descritto ad un alternatore trifase (collegamento a triangolo) e vediamo cosa accade (figura 51). L’induttore
Figura 51
dell’alternatore produce, mediante variazione del campo magnetico (a seguito della rotazione dell’induttore stesso mediante la turbina a cui è collegato), una corrente alternata trifase che va ad alimentare l’induttore del motore asincrono che in questo caso è fisso (statore). Nello spazio compreso fra le spire dell’induttore si generano campi magnetici variabili ed alternati con la stessa frequenza della corrente che li ha originati. Questi campi magnetici si compongono all’interno di quello spazio in modo da dare una risultante simile a quella dell’induttore dell’alternatore che lo ha generato. In definitiva nello spazio suddetto si ha un campo magnetico rotante (Galileo Ferraris) con la stessa frequenza dell’induttore e quindi della corrente generata dall’alternatore. Ora là dove si ha il campo magnetico rotante è il luogo in cui si inserisce l’indotto a gabbia al quale ho accennato. Questo indotto è un circuito chiuso che, sotto l’azione del campo magnetico rotante diventerà sede di correnti indotte. L’interazione di queste correnti indotte con il campo magnetico rotante provocherà la rotazione dell’indotto a gabbia del nostro motore. La rotazione è provocata dal fatto che ogni corrente indotta tende ad opporsi alla causa che l’ha generata (Legge di Lenz); e poiché la rotazione dell’indotto è generata dal campo magnetico rotante (che non si può in nessun caso annullare perché dipende dalla frequenza costante della tensione di alimentazione) l’indotto, per opporsi alla corrente in esso generata, dovrà tendere ad annullare l’effetto del campo rotante; per farlo dovrà far sì che, rispetto a sé, il campo non sia più rotante e quindi si metterà a rincorrere il campo medesimo in modo che tra sé e quest’ultimo non vi sia moto relativo (quando l’indotto dovesse ruotare con la stessa velocità del campo, esso ed il campo sarebbero l’uno fermo rispetto all’altro); l’indotto non potrà però mai raggiungere la velocità del campo a seguito di attriti e resistenze (ed in particolare a seguito dei carichi che saranno applicati al suo asse) quindi esso continuerà a ruotare con una velocità tanto più piccola quanto maggiori saranno i carichi che si oppongono alla sua rotazione (fornendo inoltre una coppia motrice maggiore per velocità più basse). Per questi motivi un motore del genere è chiamato asincrono. Si noti che non occorre alcun collettore: la semplice immissione di tensione alternata nel motore provoca la rotazione dell’indotto (la cui velocità dipende solo dalla frequenza della tensione di alimentazione e dal numero dei poli dell’avvolgimento). Si osservi anche che non vi sono problemi di collegamento in parallelo: basta ora disporre di resistenze variabili uguali da collocare ad un comando unico per regolare 1’intensità delle correnti da inviare all’induttore e quindi per inviare e mantenere in rotazione il motore. Si osservi inoltre che un motore asincrono rappresenta per la rete un carico che tende a sfasare la tensione rispetto alla corrente: è quindi necessario disporre di rifasatori.
Un motore asincrono ha il massimo rendimento (che può arrivare al 90%) quando il suo indotto ruota a velocità quasi prossima a quella del campo rotante (in questo modo si hanno meno perdite dovute al riscaldamento e meno usura della macchina) inoltre la potenza che esso assorbe aumenta con la potenza meccanica richiesta (in questo è simile al trasformatore); in ogni caso però non si deve mai usare questo motore per carichi superiori a quelli indicati dal costruttore.
CONCLUDENDO …
Non posso richiedere la comprensione illuministica di queste cose ma solo suggerire alcune conclusioni:
a) sull’onda del neoliberismo che ha abbagliato soprattutto i sinistri (gli altri già erano ciechi) è stata privatizzata (svenduta) l’energia elettrica la cui nazionalizzazione costò molto al Paese, anche in termini di messa in gioco di una montagna di denaro che è anche servita per finanziare il terrorismo golpista;
b) il servizio è peggiorato come ciascuno può essere testimone di se stesso;
c) tra le possibili soluzioni di privatizzazione si è scelta la più truffaldina per gli utenti: si è creato un monopolio privato, altro che concorrenza ! Si è diviso il settore energetico in due settori in modo comprensibile solo a chi ignora qualunque problema tecnico-scientifico: come si può pensare, date le cose che ho detto, di suddividere la produzione dal trasporto dell’energia ?
d) noi paghiamo l’energia elettrica il 40% in più che negli altri Paesi europei;
e) l’interconnessione e la riserva sono sogni da Paese civile;
f) profitto e solo profitto per i gruppi economici beneficiati dai governi;
g) nessuna innovazione e sperimentazione ma solo black out veri ed annunciati;
h) per maggior gloria dei soliti noti ed alla faccia nostra.
Categorie:Senza categoria

Rispondi